



近年、建設プロセスにおいて無人化施工技術に注目が集まっているが、技術を高度化させるためには、4Kによる車載カメラ映像の高品質化や、建機の傾きや振動等の現場情報のフィードバックが必要であり、従来よりも高速で低遅延な伝送が可能な無線通信システムの適用が必要となる。
そこで、株式会社熊谷組、京セラ株式会社、日本電気株式会社(以下 NEC)は、熊谷組技術研究所屋外実験ヤードにおいて、無人化施工に不整地運搬車の自動運転を組み込んだローカル5Gの試験環境下で、建機の遠隔操作と自動運転の実証実験を、6月に実施した。
今回の実証実験では、技術研究所の本館、及び土質実験棟にNEC製のローカル5G基地局を設置し、アンテナを屋外実験ヤードに向けて調整した。


基地局ユニットから土質実験棟内のサーバを経由し、遠隔操作室の通信機器まで回線接続が行われている。
建設機械上には、受信電力情報をリアルタイムで取得できる等の運用自由度の高い京セラ製ローカル5G対応デバイス「K5G-C-100A」を設置。

これにより、車載カメラの映像を、IP(インターネットプロトコル)ネットワークの上り回線を通じてパケット伝送を行い、遠隔操作室のモニタに表示することが可能となる(トップ画参照)。また、基本構成図は以下となる。

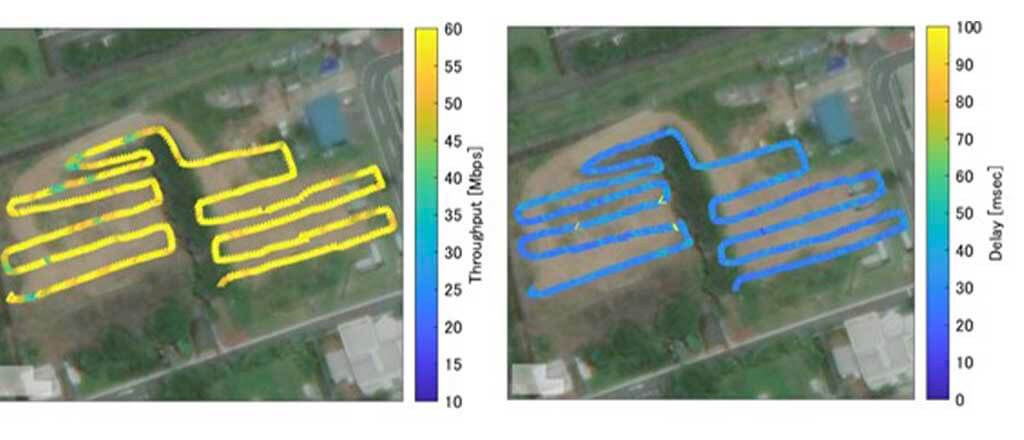
そして、屋外実験ヤード内でのスループットや遅延時間測定に関する基礎実験を実施したところ、基地局間のハンドオーバー機能(移動端末接続する基地局のスイッチ機能)を通じて、屋外実験ヤード内での高い上りリンクスループット、低遅延を達成可能なことが確認された。

今後は、複数の建設機械にローカル5G対応デバイス(京セラ製「K5G-C-100A」)を接続し、遠隔操作を実施する際の操作性を調査するとともに、現場環境での実験試験運用を行う予定だ。
また、免許による周波数帯域の占有可能な特徴を活かし、他端末からの帯域内干渉が発生しやすい無線LANとの特徴の差異を把握しつつ、複数の無線通信システムを併用しながら、建機の遠隔操作と自動走行を高度化することが可能なローカル5Gの本番導入に向けた取り組みを行なっていくとしている。