



社会インフラや産業現場において、デジタル化や自動化が進展する一方、システムの複雑化に伴う開発工数の増大や、現場ごとの多様な運用条件への対応が深刻な課題となっている。
こうした中、株式会社日立製作所は、自動車・物流分野の制御ソフトウェアを対象に、制御工学・AI・ソフトウェア工学を融合させた「Physical AI」の実現に向け、制御ソフトウェアの開発効率化および再利用技術を開発したと発表した。
自動車分野においては、Astemo株式会社と共に車載システムのコントローラ(ECU)に向けたテスト生成AI技術が開発された。
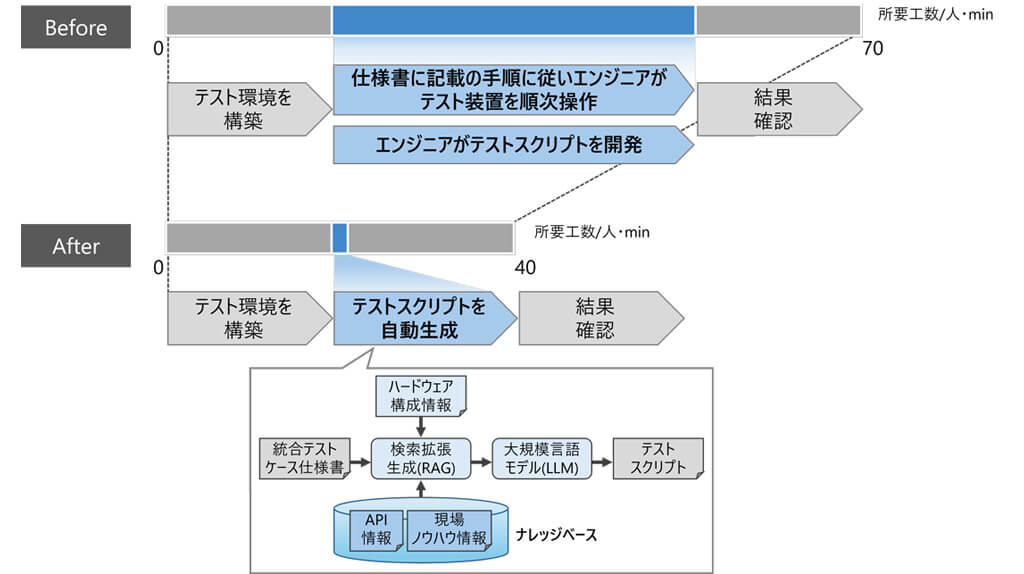
従来、実機固有の仕様に合わせたテストスクリプトの作成は専門知識と多大な工数を要していたが、同技術では、大規模言語モデルと検索拡張生成(RAG)を活用することで、このプロセスを刷新した。
具体的には、コントローラ実機固有のAPI情報や現場のノウハウを生成AIに取り込ませることで、自然言語で記述されたテスト仕様から、実機で即座に実行可能なテストスクリプトを自動生成する。
両者によるマルチコアECU(Electronic Control Unit)統合テストに関するパイロットプロジェクトでは、統合テストにおける工数を43%削減できることが確認された。

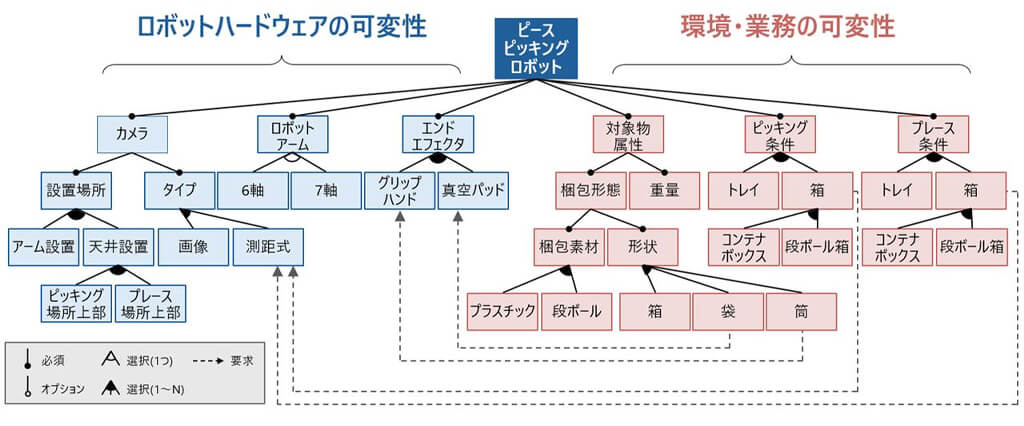
また、物流分野においては、取り扱う商品や作業手順の頻繁な変更に対応するための「変動性管理技術」が開発された。
工場や物流センタでは、環境や作業内容といった変動要素が多く、都度ソフトウェアの調整が必要であった。
今回開発された技術では、これらの変動要素を事前に分析し、機能モデルとして整理することで、ロボット制御ソフトウェア(ROS準拠)をモジュール化している。
これにより、新商品の追加やピッキング条件の変更が発生した際も、ソフトウェアをゼロから作り直すことなく、設定変更のみで再利用できるようになり、システム導入や変更にかかるエンジニアリングコストの大幅な低減が見込まれる。

なお、同技術は、自動車および物流分野での適用検証が行われており、その成果はソフトウェア工学分野の国際会議「ASE 2025」でも採択されているとのことだ。
日立は今後、これらの技術を自動車・物流をはじめとする社会インフラ分野へ展開していく計画だ。