


9月4日~9月5日の2日間、ESR株式会社がESR野田ディストリビューションセンターにて、内覧会と同時にロボットセミナーを開催した。ロボットセミナーではRapyuta Robotics株式会社(以下、Rapyuta Robotics)の森亮氏(トップ画像右)が登壇した。
Rapyuta Roboticsのクラウドロボティクス・プラットフォーム
Rapyuta Roboticsは2014年7月に設立され、日本(東京)とインド(ベンガルール)の2拠点でビジネスを行っている。同社は、現CEOのガジャン氏がチューリッヒ工科大学で博士号を取得したことにより、同大学のスピンオフとして設立したスタートアップ企業だ。
ちなみに、ガジャン氏は同大学でキバ・システムズ(現アマゾン・ロボティクス)の創業者であるラファエロ・アンドレア氏に学んでいたという。
Rapyuta Roboticsはクラウドロボティクス・プラットフォームや倉庫用ピッキングロボを提供しており、スタートアップ企業でありながら、ソフトウェア・ハードウェア・AIと幅広いノウハウをもっているのが特徴的だ。
また、同社は「ロボットを便利で身近に」というミッションを掲げているが、裏を返せばロボットは便利でなく、身近でもないということだ。
確かに日本の労働人口減少が著しいにもかかわらず、ロボットの導入は進んでいないというデータがある。
では、ロボットの導入が進まない理由はなぜか。
森氏は「メーカー間でシステムが標準化されておらず、開発者が各メーカーのハードウェアを隅々まで理解しなければならなくなるといった複雑性によりロボットの導入は進んでいない」と説明し、これは「1990年代の携帯業界の状況に酷似している」とした。


しかし携帯業界は、アンドロイドの登場によって、ハードウェア側もソフトウェア側もアンドロイド環境を前提とした開発を行えばよくなったため、こうした課題がブレイクスルーされたという。
そこで、Rapyuta Roboticsも携帯業界にブレイクスルーを起こしたアンドロイドのような存在になるべく「クラウドロボティクス・プラットフォーム」を開発した。

クラウドロボティクス・プラットフォームのできること
では、「クラウドロボティクス・プラットフォーム」ではどのようなことができるのだろうか。
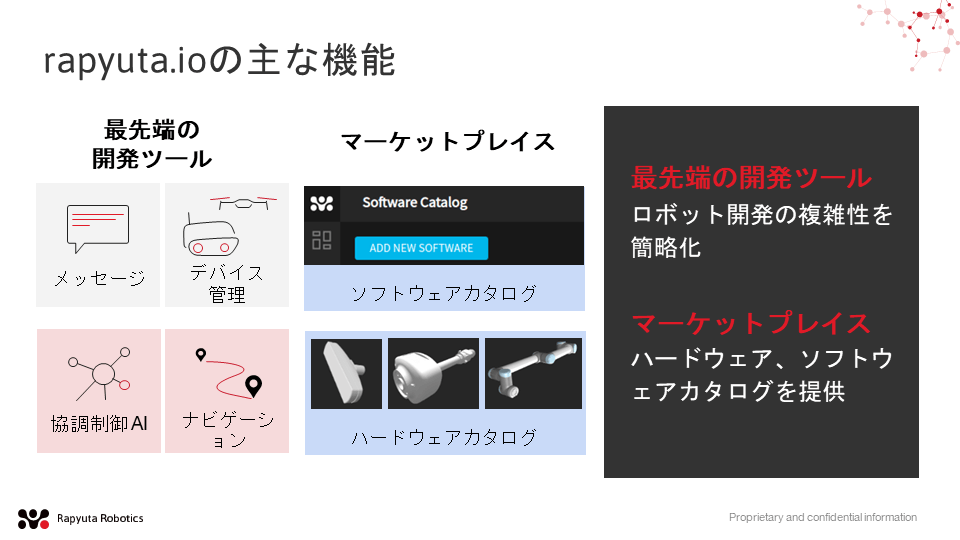
このプラットフォームでは、最先端の開発ツールとマーケットプレイスが利用可能だ。
最先端の開発ツールでは、制御可能な協調制御AIやナビゲーション等のツールが準備されているため、ユーザーはインフラ構築の手間が省ける。
マーケットプレイスでは、ハードウェア・ソフトウェアカタログが準備されており、オープンエコシステムによるソリューション開発が可能となるため、ユーザーが得意とする技術分野の開発に集中できる。
さらに、森氏は「現在カタログは自社で作成しているが、ゆくゆくは外部の企業がカタログに登録し、必要な要素をインテグレーターがクリック&ドロップすることでソリューションが出来上がるような仕組みにしていきたい」と語った。
このようにユーザーは、開発ツールやマーケットプレイスを駆使することで、開発を加速させることができる。
Rapyuta Roboticsは、このプラットフォームを利用すると、ユーザーの開発費が削減されるとして、ロボットを導入する敷居を下げる狙いだ。
次ページは、「協調制御AIのメリット」
協調制御AIのメリット
クラウドロボティクス・プラットフォームで提供されるツールの中でも協調制御AIは特徴的だ。Rapyuta RoboticsはALICAと呼ばれるシンボリックAIを使用しており、ALICAはインプットされた作業量に応じて、稼働可能なロボットを何台あてるかを自動計算することができる。
また、例えば2台のロボットが作業にあたっていたが、1台が故障してしまったというトラブルが発生しても、ALICAが故障を認識してくれる。その結果、2台で作業するプランが1台で作業するプランに自動的に切り替わるという。
森氏によれば、「ロボットを利用していると、どうしてもトラブルが発生してしまう」という。しかし、トラブルがあるたびにシステム全体が動かなくなってしまっては、物流現場におけるロボットの導入はリスクが高い。
その点、ALICAは複数台のロボットを協調制御してくれるため、トラブルがあってもロボットは作業を継続できる。
このような「協調制御する仕組みが物流現場では有効だ」と森氏は語った。
AMRにより向上するピッキング効率
同社はクラウドロボティクス・プラットフォームだけでなくAMR(自律移動ロボ)の開発も行っている。これはRapyuta Roboticsがユーザーに対して、このプラットフォームを使って何ができるかを理解してもらうためのアプローチでもあるという。
なお、現在、試作品の段階のためバージョンアップしたものが商用化される予定だ。


ユーザーはAMR(自律移動ロボ)を既存のリソース(人・物)やプロセスを変えることなく導入できる。
では、AMR(自律移動ロボ)は、実際の現場でどのように動くのだろうか。森氏より、稼働プロセスが説明された。
- AMR(自律移動ロボ)がピッキングする商品の前で待機する
- 作業員がピッキングをし、AMR(自律移動ロボ)の商品ケースへ投入する。
- AMR(自律移動ロボ)備え付けのタブレットが次にピッキングする商品とその場所を表示する。
- ピッキングされた商品を積んだAMR(自律移動ロボ)が、集荷場まで荷物を届ける。
- 集荷場の作業員がAMR(自律移動ロボ)の商品ケースから商品を取り出す。
- 集荷場の作業員が完了ボタンを押すと、1へもどる
マネージャーがロボットの所在や行き先を確認するマネジメントツールも用意されている。
他には、ユーザーがAMR(自律移動ロボ)の台数や作業員の数を入力することで1時間あたりどれくらいの生産性が確保できるのか、というシミュレーションを行うツールも提供されている。
森氏によれば、あるデータでは作業員は労働時間の半分弱を歩行等の価値を生まない時間に費やしており、AMR(自律移動ロボ)を導入することで、作業員がピッキングした商品を集荷場まで持っていく必要がなくなるため、生産性が向上するという。
つまりAMR(自律移動ロボ)は歩行という価値を生まない作業にかかる時間を低減するソリューションだ。
次ページは、「クラウドロボティクス・プラットフォームの仕組み」
クラウドロボティクス・プラットフォームの仕組み
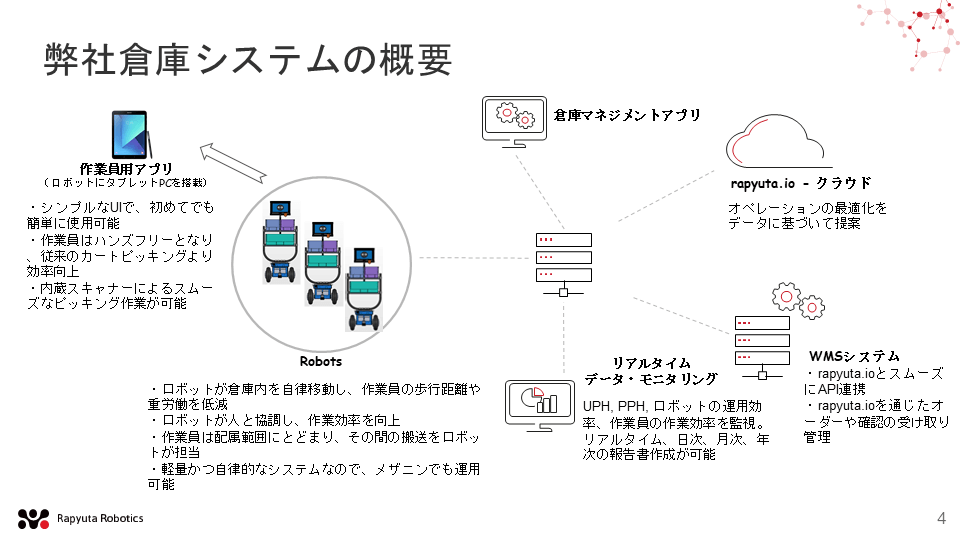
クラウドロボティクス・プラットフォームは、倉庫マネジメントアプリ、WMSシステム、リアルタイムデータモニタリングといったソフトウェアがエッジサーバーに置かれているrapyuta.ioを介してロボットと連携を行うという仕組みになっている。
なお、協調制御AIはクラウドのrapyuta.ioが、エッジサーバーのrapyuta.ioを介してロボットへ指示する際に使用されている。
AMRの仕組み
クラウドロボティクス・プラットフォームが各ソフトウェアと連携して、ロボットへ指示していることはわかったが、ロボットそのものはどのように動作しているのだろうか。
- まずロボットに必要なのはマップだ。マップはロボットがレーザーで周囲の環境をスキャンすることで作成される。そのためには一度、倉庫の中をロボットに歩かせることが必要だ。これはレイアウトが変わればその度に行う必要があるが、そこまでの負担はないという。そして、各ロボットが作成したマップはクラウドロボティクス・プラットフォームにアップロードされ、各ロボットへシェアされる。
- マップが作成されたら、ユーザーが商品棚に対しA棚、B棚といったタグ付けを行う。これは後々、ロボットがどの棚へ向かえばよいかを認識するために必要なデータとなる。
- ロボットは1と2のデータをマスターとして、自己位置推定を行い、指示通りの商品棚へ移動できる。具体的には、ロボットがレーダーで常に周囲の環境をスキャンし、そこで得られた環境情報の特徴をマップ上で参照する仕組みとなっている。
ロボットが動く仕組みの次にオーダーの振り分けプロセスについても森氏から紹介された。
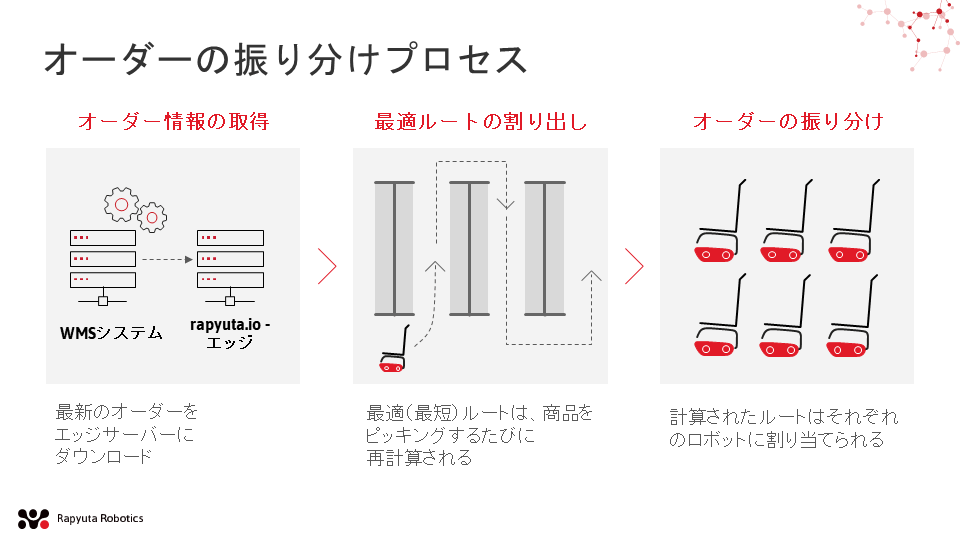
- ロボットがWMSから注文情報をダウンロードする。
- 協調制御AIが注文された商品のロケーションとロボットの台数、棚の空き具合等、様々なパラメーターにしたがって、最適ルートを計算する。
- ルートそれぞれにロボットが割り当てられる。
- ロボットがピッキングをするたびに2・3の処理が繰り返される。
GTPより費用対効果の高いAMR(自律移動ロボ)
クラウドロボティクス・プラットフォームおよびAMR(自律移動ロボ)の仕組みについては理解できたが、肝心の費用対効果はあるのだろうか。
AMR(自律移動ロボ)が他のピッキング手段と比較して、どれだけの生産性があるのかについて森氏から説明された。
ある計算によれば人間がカートを使ってピッキングする場合は、1時間あたり90個の物がピッキングされるという。
一方、AMR(自律移動ロボ)の場合では、1時間あたり200個の物がピッキングされる。つまりAMR(自律移動ロボ)は人力と比較すると2倍の生産性を有していることになる。
もちろん、倉庫の環境によって数字は変動するが、傾向として捉えるとAMR(自律移動ロボ)のほうが、人よりも生産性が高いといえる。
しかし、キバ(現ドライブ)やEVEといったGTP(Goods to Person)であればさらに効率的な作業が可能で、1時間あたり300個の物をピッキングすることができる。つまりAMR(200個/h)はGTP(300個/h)の約70%の生産性にとどまるといえる。
では、AMR(自律移動ロボ)を導入するメリットはあるのだろうか。
森氏によればAMR(自律移動ロボ)の生産性がGTPの70%だとしても初期投資やメンテナンスコストを考慮すると、AMR(自律移動ロボ)はGTPの20%~30%の程度の費用であるため、費用対効果は十分期待できるという。
また、ユーザーは作業量にあわせてロボットを増やしたり減らしたりと、繁閑期にあわせることができるというのもメリットの1つだ。
さらに、ピッキングに慣れていない作業者もロボットの指示にしたがって動けばよく、熟練者でなくても一定の生産性が見込める。
森氏は、「現状クラウドロボティクス・プラットフォームはハードウェアでいうとAMR(自律移動ロボ)との連携のみになっているが、ゆくゆくはアームやフォークリフトとも連携して、多種多様なロボット間の協調制御を可能にしたい」と話した。
物流サービスのフレームワーク化
「日本の物流品質は高いが、海外では市場をとるに至っていない。これは作業員ひとりひとりのノウハウが属人化されてしまっていることが原因だ」と森氏はいう。
しかし、「そうしたノウハウは、デジタルによってフレームワーク化することで海外へ輸出可能となるので、日本が海外の市場を獲得できる可能性は残されている」と森氏は講演を締めくくった。