


KDDI株式会社は、現在建設中の新東名新秦野IC~新御殿場ICで実施している、中日本高速道路株式会社催の「高速道路の自動運転時代に向けた路車協調実証実験」において、自動運転車の安全な運転を実現する路車協調技術の実証に成功したと発表した。
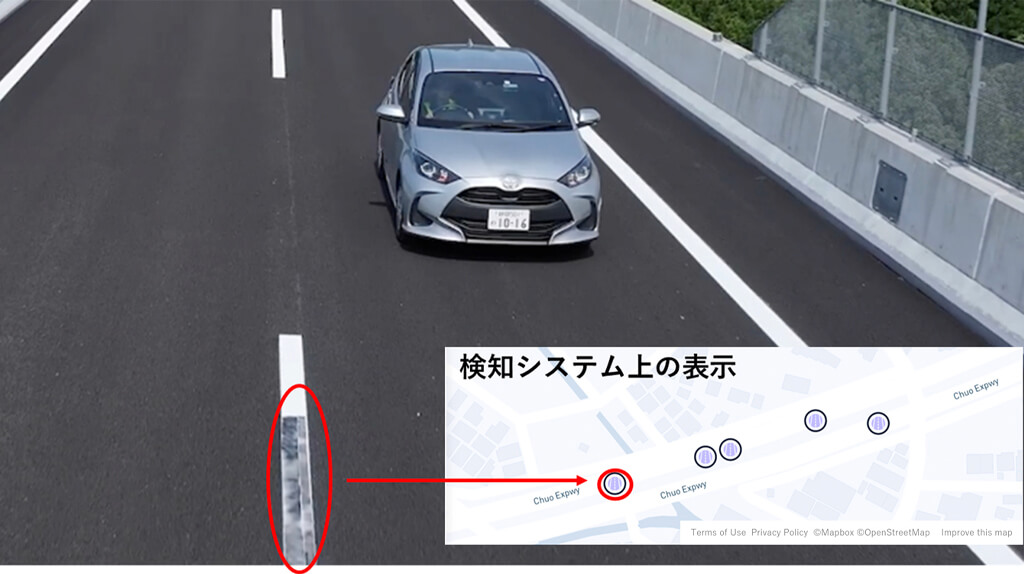
同実証では、車両に取り付けたカメラ映像から、区画線の剥離などの路面異常をAI画像分析により検知し、後続車両へ路面異常情報と手動運転への切り替えを促す通知を行うことに成功した。
今回撮影された路面状態の映像は、KDDIのセルラー通信を使用してクラウド上の管制システムにアップロードされる仕様だ。管制システムが白線のかすれなどの路面異常をAI画像分析により検知し、自動運転車の通行に支障を及ぼす可能性のある区間情報を運用監視者へ提供する。

運用監視者はセルラー通信を通じて、付近を走行する後続車両への路面異常の情報提供と、手動運転への切り替えを促す通知を行う。これにより、低コストかつ広範囲での自動運転システムの運用が可能になる。
GPSが利用できないトンネル区間においては、BLEビーコンを使用することにより、路面異常の位置特定を実現した。
今後は、道路インフラ設備の監視・点検業務への応用も目指すとしている。
[後続車両へ異常情報を伝える実験の紹介動画]

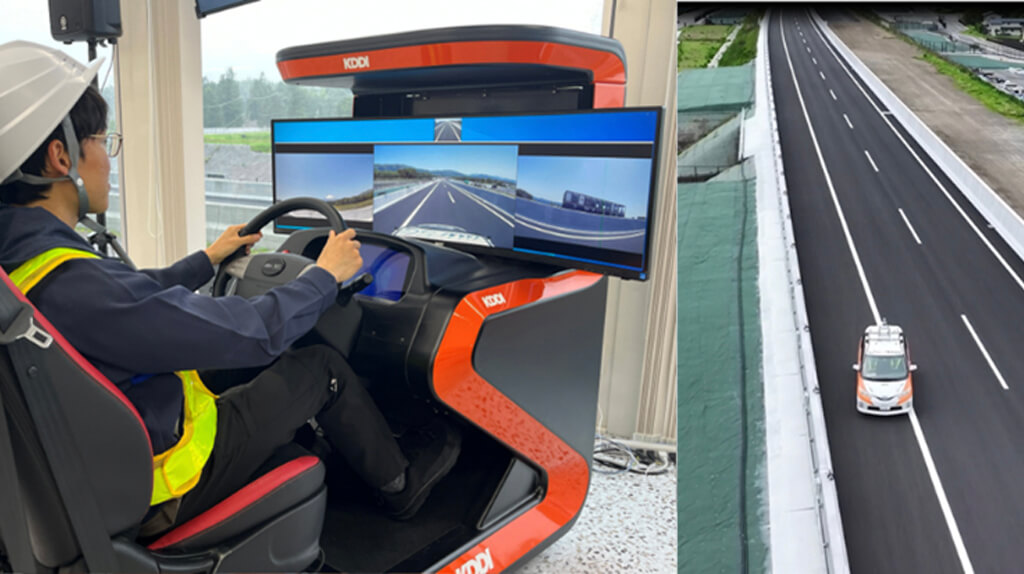
また、自動運転車が緊急停止した際に、遠隔監視場所からの操作による、車両の安全な退避とスムーズな自動運転への復帰にも成功した。(トップ画参照)
具体的には、自動運転車が緊急停止した際の、遠隔操作による車両の退避やスムーズな自動運転への復帰を行う実証実験を通じて、スループットなど通信要件の見極めに成功した。
加えて、遠隔監視時の伝送遅延や映像信号処理遅延による操作性の低下に対処するため、実際の車両位置と遠隔監視システム上の車載カメラ映像との遅延を可視化する「遅延の見える化機能」を搭載した。
遠隔監視システム上で算出した遅延情報と、車両から送信される車速・ハンドル角度の情報から、実際の車両位置を予測し遠隔監視画面上に疑似的に表示させることで、正確な遠隔操作が可能になる。
さらに、自動運転経路を遠隔監視画面上に表示し、車両の遠隔操作によって当該経路を目標に走行することで、自動運転への自動的な切り替え復帰が可能になった。
[自動運転車の緊急停止時における遠隔監視・操作の紹介動画]
