


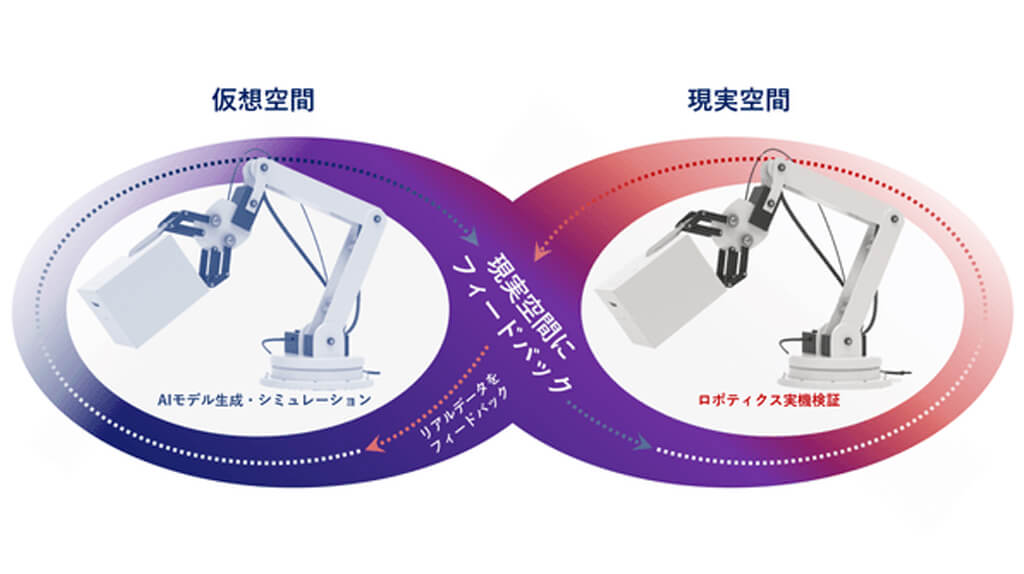
株式会社マクニカ クラビス カンパニーは、協働ロボットの実機を利用し、仮想空間でのシミュレーション結果を即時に現実空間のロボティクスにて検証できるPhysical AI検証環境を構築したことを発表した。
今回マクニカは、NVIDIAの「3コンピューター ソリューション」(AI学習基盤、仮想空間シミュレーション用のインフラ、エッジAIデバイス)を自社内で採用し、協働ロボットの実機を利用したPhysical AI検証環境を整備・構築した。
このデモンストレーションでは、仮想空間でロボットの学習用データを生成・拡張し、現実空間で物体のピックアンドプレースなど、AIモデルの開発から実機検証までを行える。
この環境の最大の能力は、AI学習用データセットを仮想空間(デジタルツイン)で効率的に生成・拡張できる点だ。
具体的には、ロボティクスシミュレーションフレームワーク「NVIDIA Isaac Sim」などを活用し、仮想空間上にロボットや作業環境を精密に再現する。
これにより、現実の現場で収集が難しい、あるいは危険なシナリオの学習データを、安全かつ大量に作成することができる。
また、世界基盤モデルを使用したフィジカルAIである「NVIDIA Cosmos」を用いて、生成したデータセットにさまざまな条件やバリエーションを加えることでデータを拡張する。
なお、この環境は、仮想空間でのシミュレーション結果をすぐに現実空間の協働ロボット実機で検証できる能力を持っている。
例えば、「NVIDIA Isaac ROS」と、最適な動作を計算する「NVIDIA cuMotion」を活用することで、カメラ映像から得られるロボットと障害物情報より、ロボットが未知の障害物を回避しながら、2つの所定のポーズ間で最適経路を数秒で生成する。
この最適経路を仮想空間と現実空間の両方で評価し、動作精度や反応速度を確認することが可能だ。
他にも、ロボットアームによる物体のピックアンドプレース(つかんで置く)などの一連の作業工程を、仮想空間でのシミュレーション結果に基づき、現実空間の実機で動作させ、精度と安定性を確認できる。
今後は、Physical AIにおける顧客との共同検証の場を整備し、パートナー企業とのコミュニティネットワーク形成を目指すとしている。
なお、2025年12月3日から東京ビッグサイトで開催される「2025国際ロボット展」にてデモンストレーションを展示するとのことだ。