



野生動物の保護管理を目的に、AIで野生動物の移動経路を予測することは重要である。しかし、これまでの機械学習のアプローチでは、移動した経路における周辺の環境情報を適切に考慮できていなかった。
そこで東京農工大学大学院グローバルイノベーション研究院の藤田桂英教授らは、周辺の環境情報を考慮しながらニホンジカの移動経路予測を行うことができるAI技術を開発した。
今回開発された技術は、周囲の環境要因を考慮しながら野生動物の移動経路を予測する、新たな機械学習のアプローチを提案した。
研究は、東京農工大学工学府情報工学専攻風間健太郎氏(現在三菱電機勤務)、藤田桂英教授、小池伸介教授、篠田悠心氏(現在国立環境研究所勤務)が共同で行い、東京農工大学融合研究支援制度「TAMAGO」の支援を受けた。
今回提案されたアプローチは、周囲の環境要因を考慮できる機械学習モデルをベースにしたもので、これによりより高性能な移動経路の予測が可能となる。
このアプローチは、長期の各時点同士の依存関係を学習することができる機械学習モデルに基づいた移動経路予測モデルに対して、周囲の環境要因を考慮することができる機構を付加することによって、より高性能に移動経路の予測を行うことが可能だ。

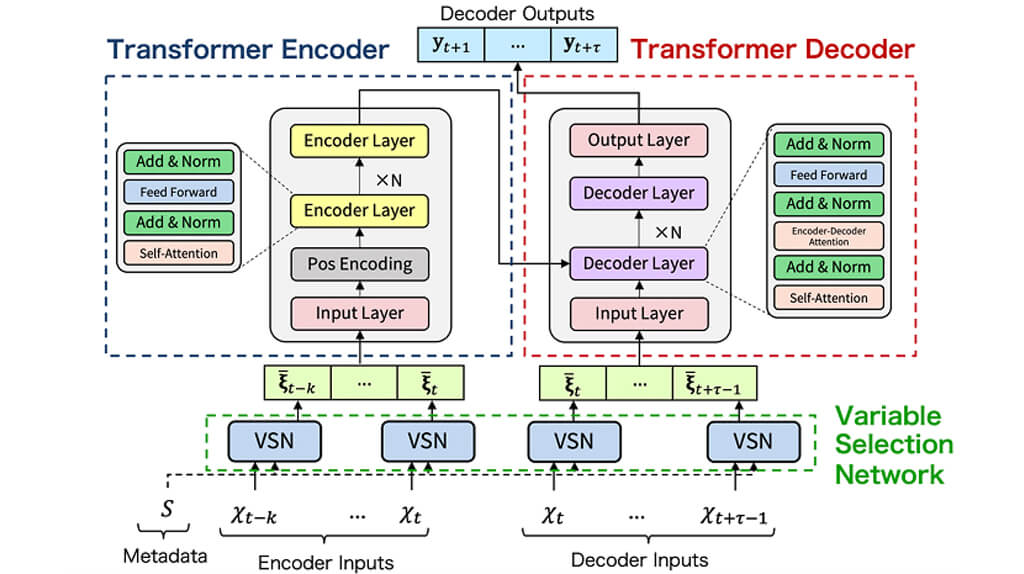
また、提案手法では、移動経路を予測する際に、訓練に使用した過去の移動経路のどの部分に着目しているかを可視化することができる。
データセットは、神奈川県丹沢エリアを主とした1年以上の期間のニホンジカの観測記録を評価のために用いた。データセットには、ニホンジカの個体情報、緯度と経度、日射量、斜度、標高、植生などの変化情報が記録されている。
評価実験の結果、環境要因を考慮している提案手法が既存手法より高い性能であることを示した。また、移動経路における土地利用と植生に関する環境情報が正確な予測のために特に有効であることが明らかになった。
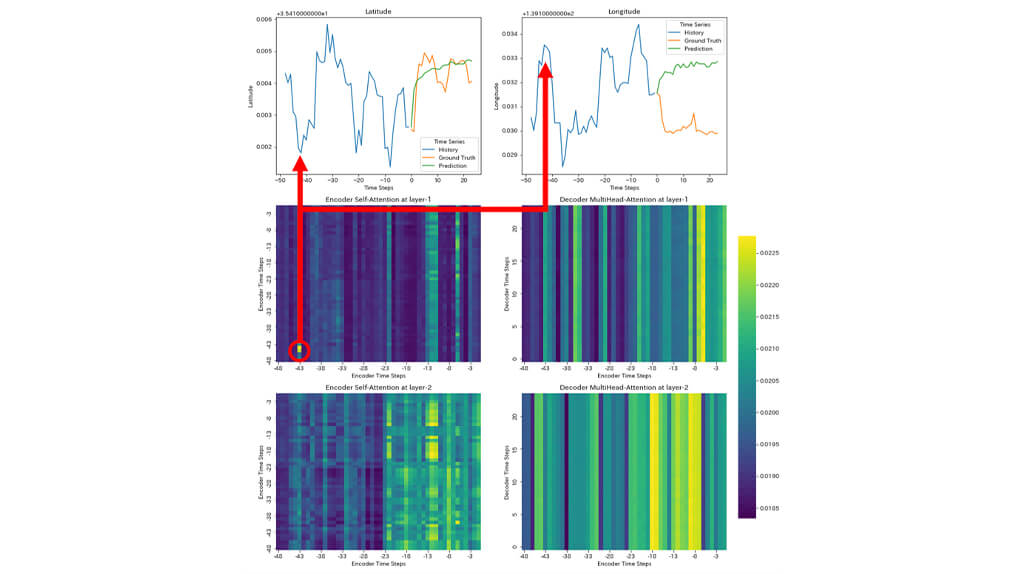
さらに、提案した機械学習モデルが、観測期間内に個体が大きく移動した時点を注目して予測しており、ニホンジカが移動経路を大きく変更する際の位置情報やその部分の環境情報を適切に考慮している。
また、移動経路を予測する際に、訓練に使用した過去の移動経路のどの部分に着目しているかを可視化することも可能だ。評価実験の結果、提案手法は既存手法より高い性能であることが明らかになった。
下図では、提案した機械学習モデルが訓練時にニホンジカが大きく移動した時点を特に注目して予測していることから、移動経路が大きく変更した際の位置情報や環境情報を適切に考慮できていることがわかる。
今後この技術を用いて、ニホンジカをはじめとする野生動物の移動経路予測を行うことで、生態や移動経路の変化に適応した保護管理を行うことが可能となるほか、新たな野生動物の生態解明への活用も期待されている。