


自動運転の技術開発が加速している。高速道路などの特定の場所に限り、無人運転を行う「自動運転レベル4」のクルマはまだ市販はされていない。しかし、その技術開発は水面下で進み、公道での走行実験が世界各地で始まっている。
Roadstar.aiは、深セン発の自動運転ベンチャーだ。GoogleやApple、テスラ、Nvidiaなどを経て、Baidiu USAで出会った3人のエンジニアが興し、昨年の5月に設立した。
自動運転に必要なコア技術をそろえたフルスタックソリューションを提供する同社は、中国の「人通りの多い公道」でレベル4の走行実験を行っている。今年の5月には第1世代製品「Aries」を発表し、シリーズAラウンドで1億2800万米ドルの資金調達を行った。
どのような技術を持っているのか、中国での自動運転の取り組みはどこまで進んでいるのか。Roadstar.aiの日本担当である、Senior Business Development Managerの劉若一氏に聞いた。
1. 中国で「ロボタクシー」のリーダー企業を目指す

Roadstar.aiの技術を使った自動運転の様子。運転席にいるドライバーは一切ハンドルを握っていない。
-中国の深センを拠点とする自動運転ベンチャーとして、昨年、設立されたばかりだそうですね。具体的には、どのような事業を展開しているのでしょうか。
劉若一氏(以下、劉): Roadstar.aiの使命は、中国で「ロボタクシー」のリーダー企業になることです。ロボタクシーとは、タクシーやレンタカー、カーシェリングなどすべての「ライドシェア」サービスを自動運転のクルマによって包括的に提供することです。
昨年の5月に設立したばかりのベンチャーですが、この短い期間でシリコンバレーや中国の深セン、南京、重慶などで路上テストを行ってきました。90名の社員がいますが、ほとんどがエンジニアであり、自動運転の技術開発に力を入れています。
-御社が進めている「レベル4の自動運転」とはどういうものですか。
自動運転には5つのレベルがあります。私たちが開発しているのはレベル4(L4)の無人運転のクルマです。L3までの「自動運転」とL4以上の「無人運転」では、必要な技術が根本的に異なります。
L4では、各センサーの情報を融合させる技術、高精度地図の作成、複雑な条件下で判断できるAIなど、0から開発しなければならない技術が多く、L3以下の技術から漸進的に進化できるものではありません。
世界でL4のクルマをまだ市販できる状況にないのは、こうした技術のギャップが背景にあります。
-自動運転とひとことで言っても、さまざまな技術が関わってきます。御社ではどのようなソリューションを提供しているのでしょうか。
劉: 当社は「フルスタック」のソリューションを提供します。センシングから制御まですべて行います(下図)。その中でも、強みはセンシングと動体認識の技術です。

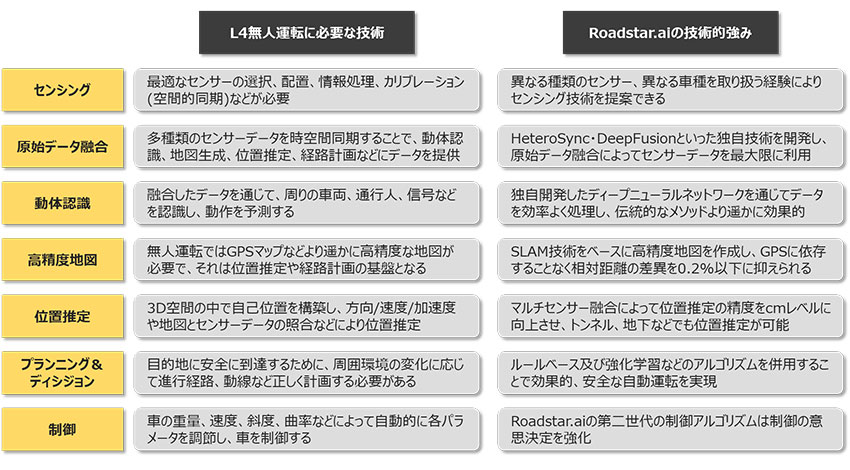
自動運転のセンシングでは、ヒトやモノを認識する「ステレオカメラ」や距離を測る「ミリ波レーダー」、リアルタイムに3D点群モデルを生成して、物体と自車のあいだの距離を認識する「LiDAR」など複数のセンサーを使うのが主流です。
しかし、高性能のLiDARは非常に高価です。そこで、最近は個々のセンサーの性能を求めるよりも、複数の比較的安価なセンサーを使い、融合させることで高精度なセンシングを行うのがトレンドです。
当社もその「マルチセンサー融合」の技術を使っていますが、その際に一つ、当社が異なる点があります。それは「原始データ融合」の技術を用いていることです。
多くの場合、マルチセンサー融合で「動体認識」を行うには、個々のセンサーから得たデータを分析したうえで、その結果を融合します。
しかし、当社が用いる「原始データ融合」では、カメラで映したヒトとLiDARで認識したモノを原始データのレベルで融合してから、分析します。これにより、動体認識の精度が格段に上がるのです。
2. 自動運転を中国でやることに意味がある
-世界には、自動運転に取り組む企業は数多くあります。御社の強みは何でしょうか。
劉: 技術力はもちろんですが、中国で自動運転を展開することに意味があると思っています。AIはたくさんの「異常データ」を学習させないと進化できません。これまでシリコンバレーや深センなどで路上テストを行ってきましたが、やはり中国の方がそういう異例な状況が多いです。
ヒトが道路を横断しますし、逆行もあります。自転車に乗ったフードデリバリーのお兄さんが突然飛び出してくる、といったことが頻繁にあります。中国には自動運転のAIにとって、豊富にデータを取れる環境があるのです。
-なるほど。
劉: 今後、自動運転に関わるエコシステムは6種類のプレイヤーから構成されると考えています。通信事業者、センサーなどのハードウェアのメーカー、自動運転の技術開発を行う企業、政府、ライドシェア事業者、自動車・部品メーカーです。
その中で中核になるのは、やはり自動運転の技術開発を行う私たちのような企業だと思っています。これまでクルマのコア技術は自動車そのものにありましたから、自動車メーカーが主導権を握っていました。
しかし今後は、自動運転に技術の焦点が移ってきます。すると、センサーは何を使うべきか、どこに配置すべきかということがわかる自動運転の開発者が中核になっていきます。実際に、お客さんと一緒にプロジェクトをやっていると、そう感じます。
-ゆくゆくは、中国以外でもロボタクシーを展開されるのでしょうか。
劉: 海外ではロボタクシーではなく、「技術輸出」というカタチで、他社さんから要望があれば技術を提供して、一緒にプロジェクトを進めていきたいと考えています。
なぜなら、中国の企業が海外の自動運転に参入するのはかなり難しいことです。法規制や政府との交渉がありますから。中国に関しても、外部から参入することは困難です。
たとえば、L4の自動運転には3Dの高精度地図をつくる必要がありますが、そうした情報は中国では極秘情報で、取得するにはライセンスが必要です。私たちが海外に進出する場合も同じことです。

-直近の計画について教えてください。
劉: 現在すでに国内外の自動車OEMと共同で自動運転用車両を開発しながら、車両の調達を進めています。2019年には自動運転のクルマを200台、2020年には1,500台を投入する予定です。
当社にとって、2019年の取り組みの中心は技術力の向上です。複数台のクルマで路上テストを実施し、データ量を増やしながらアルゴリズムの強化を継続します。
2020年からはさらにクルマを増やし、特定のルート/エリアでお客さんから料金をいただきながらサービス運営の実証実験を進めていく予定です。サービス展開のエリアとしては、深センをはじめ中国の大都市を考えています。人口密度が高く、タクシーの需要も多いからです。
-人通りの多いにぎやかな道路で試験するのですね。
劉: はい。選ぶとしたら、繁華街などのにぎやかな場所を選びたいです。
-そういう場所で試験できるのがすごいです。
劉: そうですね。プロモーションの意図もありますが。
先日、Googleの子会社であるWaymoが、年内にアメリカの一般顧客に対して有料のロボタクシーサービスを提供すると発表しました。後発の当社はその技術力とスピード感に感心しながらも、中国発のロボタクシー事業の展開を日々進めています。
また、年内には当社のセンサーやシステムを搭載した自動運転のクルマをつくり、上海の試験区域内で走らせる予定です。その際は、配線などが露出しないように、クルマそのものを改造して、お客さんが実際に乗りたくなるようなクルマをつくります。
-車体の上でLiDARがくるくる回るのが自動運転のクルマの特徴ですが、それもいつかは露出しなくなるのですか?
劉: そうです。このようなセンサー内臓型のクルマを「ソリッドステートLiDAR(SSL)車体融合」型といいます。複数のLiDARを車体に作りこみ、それぞれが決まった方向にレーザービームを照射するしくみです。
そうしたしくみを使うことで、コスト削減や軽量化などのメリットが得られます。このSSLを、クルマを生産する段階で搭載する方法が2019年前半以降、実用化され、主流になっていくと思います。
3. 日本のものづくり町工場を発掘していきたい
-自動運転の新しい技術がどんどん生まれているのですね。
劉: はい。当社ではさらに最近、「運転シミュレータ」という技術を開発しました。自動運転のAIを訓練させるには、実際の公道で実験するのが普通です。しかし、それには限界があります。
クルマの数が限られますし、その地域でライセンスを取得できるかという問題もあります。運転シミュレータは、仮想の世界でクルマを走らせます。そうすると、訓練させるクルマの数はいくらでも増やせます。
運転シミュレータでできることは主に2つあります。1つは、これまでに実際に走行した公道のデータを使って、同じ環境を再現することです。そこで、クルマの動作を変えたら何が起きるかをテストします。
もう1つは、「橋が急に折れる」など、現実世界にないような場面をつくることです。先月、深センでは台風がきて、たくさんの木が倒れました。そうした状況でクルマがどう判断するのか、訓練していくのです。
-日本ではどのように事業を進めていくのですか?
劉: 私たちの今の課題は、センサーの価格が高いことです。「マルチセンサー融合」とはいえ、一つ一つのハードウェアの価格はまだ高く、技術開発においてボトルネックになっています。
自動運転の社会が実現すると、人間が運転しなくていい代わりに、その分のコストが下がることがメリットです。それなのに、センサーが高いままではそのメリットはなくなってしまいます。
-そうですよね。
劉: センサーのコストを下げることはどの企業でも課題です。Waymoはある程度コストを下げることに成功しています。彼らはLiDARなどを内製化しているからです。当社もそうする予定です。しかし、内製化するためには、ハードウェアを構成する一つ一つの部品を色々なところから調達しなければなりません。
そこで、日本のものづくり企業の力をお借りしたいと思っています。日本は大手企業だけではなく、すばらしい技術を持った中小規模の企業がたくさんあります。今後はそうしたものづくりの中小企業をたくさん発掘して、当社の技術に組み込めないかと考えています。
実際に商談している企業が既に何社かあり、かなり話も進んできています。
-自動運転の社会はいつ頃やってきそうですか?
劉: 難しい問題ですね。当社も技術力を主張してはいますが、やはり自動運転の技術はまだまだ未熟だというのが正直な認識です。
今のレベル4の自動運転というのは、自動運転というよりは「自動的にクルマを避けるしくみ」だと思います。クルマ自身が「眼」をもち、クルマ単体として動くのですが、今後はスマートシティという枠組みでV2X(クルマとモノ・ヒトをつなげる通信のしくみ)の技術が進化していくと、クルマ単体で認識するよりは、周囲の環境や街と協調しながらの自動運転のしくみができると思います。
ただ、V2Xもまだまだ未熟です。まだクルマ単体で解決しようとしています。もしかしたら今後、5GやV2Xの時代がくると、さきほどご説明した「動体認識」などの技術への依存度が下がるかもしれません。あくまでクルマ単体の技術ですから。当社としては、そうした自動運転の理想像を見据えながら、技術開発を進めていきたいと考えています。
-最後に、深センのスマートシティの取り組みはどうですか?
劉: 実は、中国の中で深センはそこまで進んでいる方ではありません。上海や杭州は進んでいます。杭州では面白いことに、高速道路の車道にインターネットのインターフェースが整備されていて、インターネット機器が常に接続できるようになっています。
そのインターフェースを使ってどのようなサービスを実現していくのかはこれからですが、そうした最先端の取り組みが既に始まっています。
-本日は貴重なお話、ありがとうございました。
【関連リンク】
・Roadstar.ai