2017年のハノーバメッセで、ひときわ巨大なブースを構えて様々な産業機器を展示していたベッコフオートメーション。
日本では、最近トヨタが工場のネットワークにEtherCATを取り入れたということでも一躍脚光を浴びた。
そんなベッコフオートメーションの日本代表、川野氏に同社についてお話を伺った。
業界最速、省配線の産業用ネットワーク、オープンなコミュニティが特徴のEtherCAT
ベッコフオートメーションは、1980年の創業で37年目を迎えました。全世界では3,350人の従業員がいて、今年の売上高は6億9千万ユーロぐらいです。日本円にしてだいたい850億円ぐらいの規模のビジネスなのですが、2000年からの年平均成長率が15パーセントぐらいあって、この分野では元気よく成長している企業だと思います。
日本に進出してきたのは2011年で、25名規模のスタッフで日本のお客さまのサポートを行っています。この夏には名古屋でオフィスを立ち上げることになりました。
よく知られている通り、トヨタがEtherCAT(イーサキャット)を採用されたというニュースは、ちょうど去年のハノーバメッセ、まさにこの会場で発表されました。それ以来、非常に関心も集まりましたし、問い合わせや引き合いはかなり増えて、EtherCATが注目されているという状況が続いています。
-そうですよね。産業用ネットワークで素人の人でも、口にするネットワークってEtherCATですよね。他のを知らないだけだといえばそうだし、他の人からするといろいろ言いたいことがあるのでしょうが・・・笑
実際、業界で5大産業用イーサネットと呼ばれているのは、EtherCAT(イーサキャット)も含め、PROFINET(プロフィネット)、EtherNet/IP(イーサネット/アイピー)、日本で言うとCC-Link IE(シーシーリンクアイイー)とかMECHATROLINK III(メカトロリンクスリー)などが挙げられます。
ワールドワイドでは、PROFINETが一番手で、EtherCATは現在二番手ではないかと思います。
これらのネットワークは、動作原理によりそれぞれ異なる特徴があります。
EtherCATの最大の特徴は、「とにかく高速」であるということ。同じ100Mbps物理層を持つものでいうと、業界の中で最速のサイクルタイムを実現できるのはEtherCATです。
あとは省配線。ケーブルの本数が少なくて済むという意味での省配線という特徴も他とよく比較されるところです。
さらに、「オープンである」という点も重要です。EtherCATテクノロジーグループ、EtherCAT協会は、世界最大の産業Ethernet協会。現在加盟企業は4410社にも上ります。
オープンであるためには、「スレーブ側がオープンである」というだけではなく、「コントローラー側もオープン」である必要があります。
例えば、ETGのメンバーであればEtherCATのコントローラーを、誰でもライセンス費用無料で開発できます。たいていの場合、スレーブ側は自由に開発できても、コントローラー側を開発することができません。
一方で、EtherCATには「ベッコフ純正の製品もある」のですが、ユーザが内製することもできるし、同業他社も自由に作ることもできるし、そこはETGのメンバーであればもう誰でもウエルカムという方針です。
まとめると、「高速」、「省配線」、「オープン」。この三つがEtherCATの特徴を表しているといえるでしょう。
-なるほど。日本でいろんな記事を読んでいると、EtherCATはベッコフの製品数が多いって表現をよく目にします。始めた企業が多いに決まってるのですけど。
確かに当初日本で展示会に出展した際、結構おかしかったのが、「ベッコフさんもEtherCATやっているのですね」と言われたことがあります。
実際、現状では、「ベッコフオートメーション」という会社名よりも「EtherCAT」という規格の方が、マーケットの認知が高い状態があるのです。
ベッコフオートメーションがEtherCATを作ったということを、知らない人はまだまだいるのだと思います。
-確かにネットワークコントローラーの類いを見てると、EtherCATの矢印のマークだけが書いてあって、別にそれが「ベッコフ」と書いてあるわけじゃないから、なんかそういうものなのだろうなって、思っている人が多いかもしれないですね。


まあ実際にIECやISOの標準規格にもなっていますし、SEMIの標準も取得しています。だからもともとベッコフが開発したのは事実ですが、規格としては国際標準となっていて、誰でも使えるし、「ベッコフ製である必要はない」という状況です。
—他のネットワークとの比較上、特にEtherCATが指名される理由としては、さきほどの三大ポイントが大きいのはわかりました。でもそこの三つのポイントって、どこでも大事にすると思うのです。
そうですね。
一方で、産業用ネットワークは、非常にハイエンドな要件がどうしても必要という場合もあれば、別にそんなに速くなくてもよい場合や、とりあえずちゃんと動けば良い場合など、要件がさまざまです。
そうすると、最速のネットワークでなくても、今まで使っているネットワークで動けば十分だったり、使い慣れているものを継続して使いたいといった、様々なニーズがあるので、必ずしもすべての場面でEtherCATが必須ではありません。
実際には、「使い分けをする」という場面が多いのではないかと思います。
—マルチネットワークモジュールなんかも最近出てきているみたいですよね。
そうですね。
必ずしも今使っているものがすぐ使えなくなるというわけでありません。設備とか機械の切り替えのタイミング、例えば10年とか20年ってサイクルで「ネットワークはどうしようか」ということになるのですが、その際、EtherCATも一つの有力な候補として土俵には乗ると思います。
有名な事例となっている、トヨタ自動車の場合でも、ちょうどそういうサイクルが来たときに、いろいろ検討されて、その結果としてEtherCATを選んだということだと思います。
—トヨタなんかは、我々からすると、すごく高速で高性能のロボットアームを制御している。でも、ケースバイケースなので、ネットワークを変えるとなったら、パソコンみたいにネットワークボードを交換する感じで良い話なのか、いやコントローラごとかえる必要があるのかどっちなのでしょうか?
それはとってもいい質問ですね。例えば我々のコントローラーを他社製に切り替えるのは割と簡単にできます(笑)。
というのは、プログラミング言語には標準のIEC言語を使っていますし、テキスト言語でないラダーなどもXMLにエクスポートできるためです。
だから、他のコントローラーに変えようという場合、「EtherCAT使えるやつある?」「あるよ」「自分が作ったプログラムそのままポーティングできる?」「基本的にできるよ」ということになります。
一方で、今までの古いものは、そういうポータビリティがなかった。だから今までたくさんのプログラムを開発資産として保有していても、他社製に乗り換えた瞬間に使えなくなってしまうケースが多くあって、皆さんすごく困られています。
—まさに、20年ぐらい前にITの世界で全く同じことが起きています。現在ではクラウドサービスが増えてきて、プログラム言語どころか、コンピュータを地上に設置していることがリスクになりかねないことすらあります。
ほんとにおっしゃる通りだと思います。
制御システムも同じで、性能や機能の要件があれば、思い切って新しいアーキテクチャに変えて、国際標準を使い、オープンなネットワークに切り替えることが必要です。その一方で、その必要性が十分でない場合は、どうやって既存のモノを延命させるかに神経を注ぐようになるわけです。
我々は別に後者の方々に対して無理やり「変えてください」というつもりもないですし、それはそれでなんとか応援したいなと思うのですけれども、私たちがビジネスとしてフォーカスしたいのは当然「アーキテクチャを刷新したい」という場合になります。
同じコントローラーを使うなら、パフォーマンスをより引き出したい、フレキシビリティを与えたいといったニーズや、クラウドとの接続、例えばAmazon AWSにつなげたいという顧客に対しては、できるだけ必要なツールを提供したいです。
つまり、どちらかというと後者の人たちに無理やり切り替えていただくというよりは、前者の人たちをなるべく支援したいという気持ちで仕事をしています。
コースターサイズのコントローラー、業界最小のIPC
—ところで、ベッコフオートメーションは、EtherCATだけではなく、様々な産業用コンポーネントを製造販売されています。
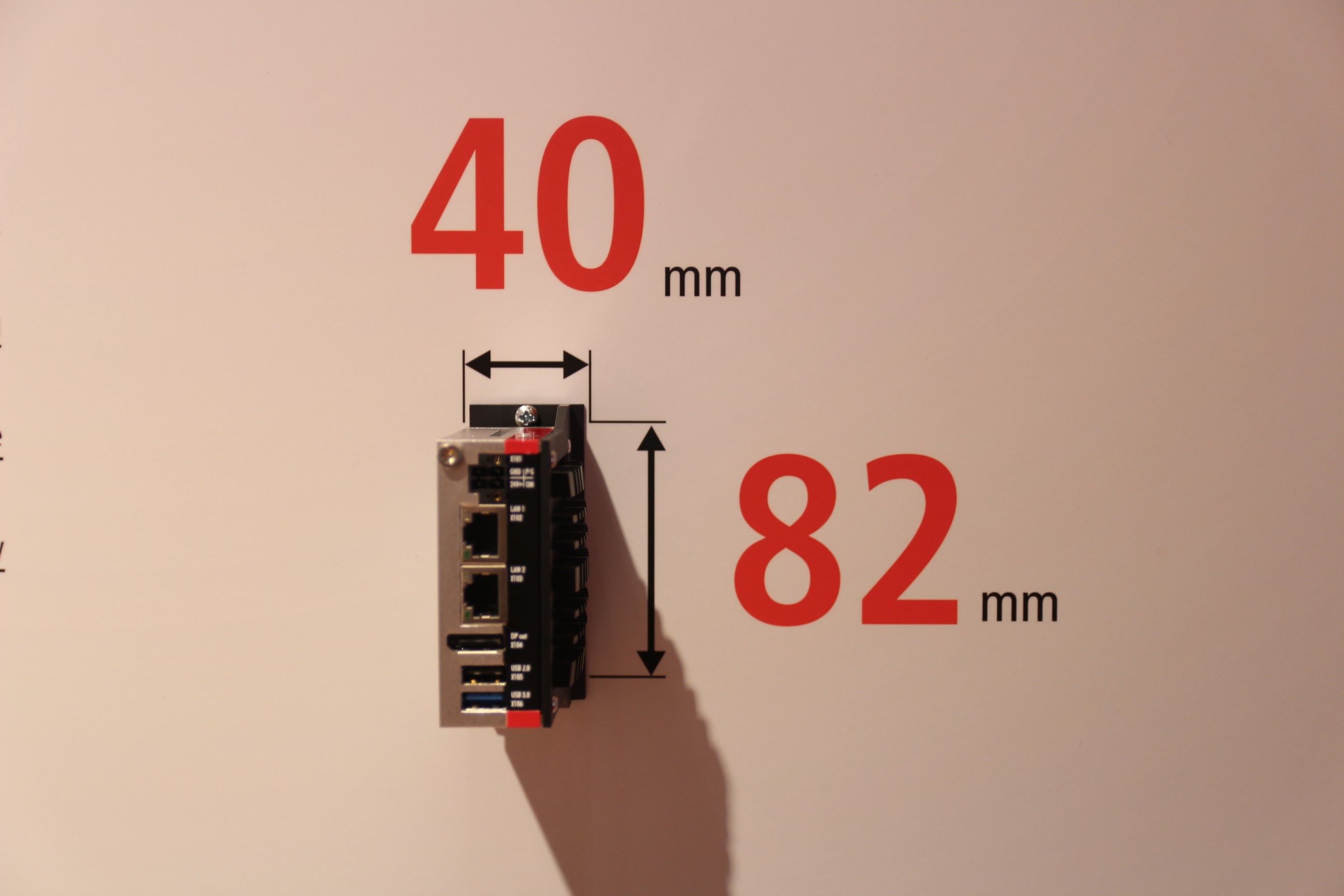
まず、新しくリリースされた、コントローラーですが、とっても小さいっていうのが大きな特徴です。ドイツ製というと大きいイメージもあるのですが、超小型IPCです。
このサイズでクアッドコアのIntelプロセッサを装備しています。
さらに、4GBのRAMに30GBの3次元のMLCのM2 SSDが搭載されています。最大60GBまで拡張可能です。
—これ、ファンレスですか?
ファンレスです。ヒートシンクで放熱をする設計です。
産業用途なので、動作環境も0度から55度。かなり熱くなっている制御盤の中で密封されていても頑張って働きます。
—マイナスの温度には対応しないのですか?
起動してしまえば、自分の熱で温かくなるので、マイナスにはなりません。

また、24ボルトのDCで動いて、イーサネットポートも二つあるから、「Ethernetで、IoTゲートへ」というふうに使うこともできるし、EtherCATマスタにして「ロボットの制御をする」とか、「工作機械やマシニングセンターの制御をする」という利用もできます。
さらに、PROFINETマスタとして使うとか、Ethernet/IPマスタとして使うなどなど、ドライバさえインストールすれば、どのネットワークも利用可能です。
また、HMIと呼ばれる、操作画面を出力することもできますし、USB3.0でそれこそストレージ付ければ何テラもデータを扱えます。
—それがこのサイズに収まっているのですね。
業界初だと思います。
それもあって今、日本の企業から数多くの引き合いが来ています。
最新鋭の機械買ってくればだいたいネットワーク対応しているので、IoT化はさほど難しくありません。しかし、皆さん困っているのが、既設の古い設備のネットワーク対応です。
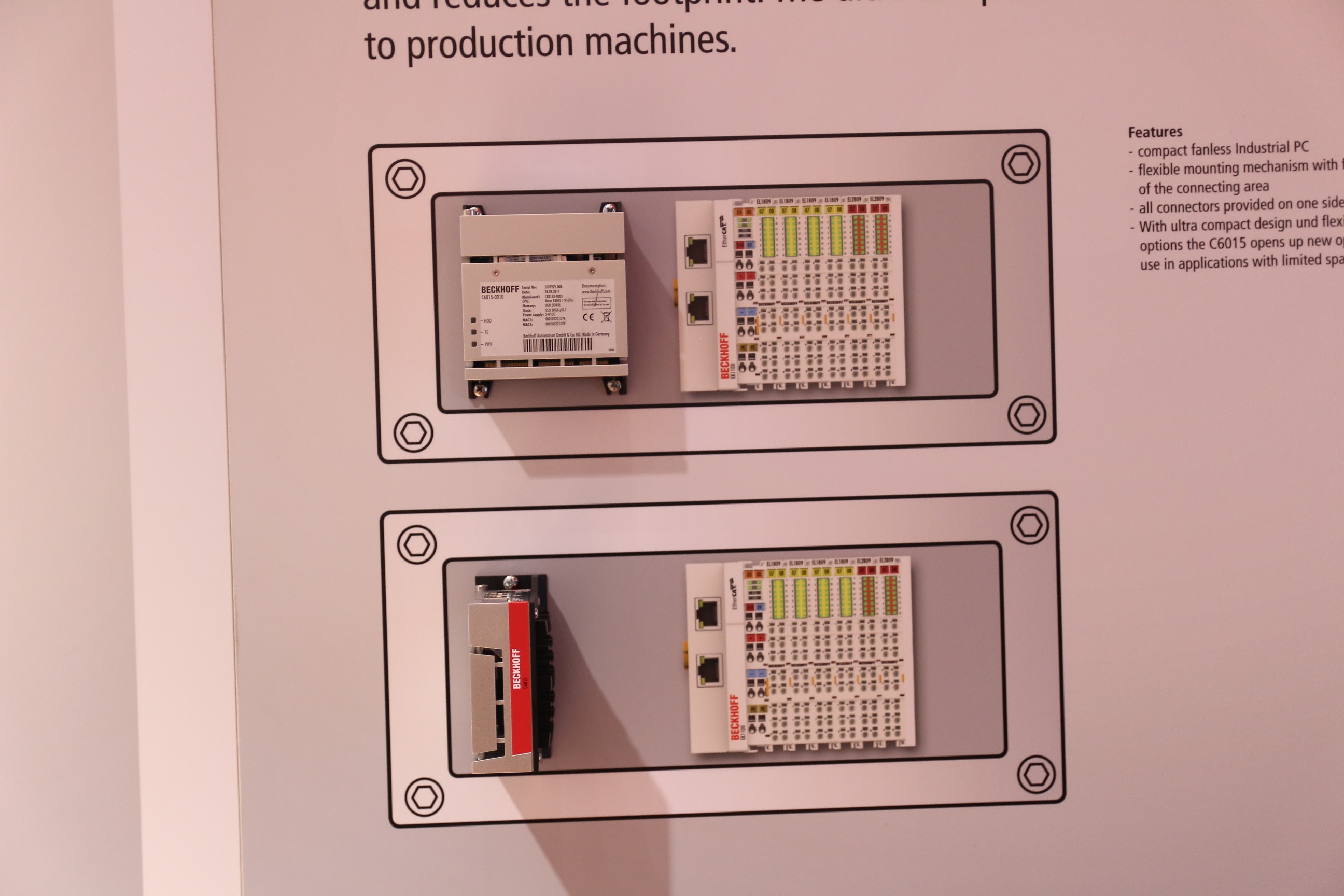
センサーを足したいといっても、今のコントローラーじゃできないからIoTゲートウェイ的なものを入れなければならない。
一方で、現状の制御盤を開けたら「もう入れられる場所がない」ということになりがちです。
そういうシーンでこの製品はとても役立ちます。
既設の設備にIoTゲートウェイとしてつないであげると、クラウドにも接続可能です。
もちろん、TwinCATを入れて設備につなげればリアルタイムコントローラーにもなります。
最高スペックの巨大産業用PC

さらに、こちらにあるものは、「ビックアイアン」と呼んでおります。これも業界の中で、例をみません。
—なぜみんなこういったハイスペック産業用PCを製造しないのでしょうか。
たぶん、アプリケーションとしてこれを活用できるようなソフトウエアを持ってないケースが多いからだと思います。
XEONプロセッサー、18コアのモノを2個搭載できるので、最大36コア分の処理能力があります。
—もうあれですね。マシンラーニングできそうな感じですね(笑)。
GPUをPCIeスロットに追加すれば本当にディープランニングもできます。これに「TwinCAT(後述)」というソフトウエアを入れるとPLCにもなります。
PLC、NCやロボットコントローラーにもなるので、このビッグアイアンからEtherCATで、ロボットにつなげばロボットアームを動かすことができるし、そこでとってきた関節角や速度など、様々なデータについて、GPUを搭載すればディープラーニングを活用して、ロボット自身が動いている動作そのものを学習して、さらに賢く動く(フィードバックする)機械を作ることが可能となります。
—そういうのって今まではロボット側にいれていましたよね?
実際にこれを実現するには、PCと「ロボットコントローラー」の二つが必要ですが、リアルタイム通信がその両者間でできず、繋がらなくて困る方も多いです。
これをビッグアイアンでは、同一の筐体でできるので一気に解決できます。
ビッグアイアンも、ハードウエアとしては汎用の産業用PCなのですが、これをリアルタイム制御に使えるソフトウエアである、「TwinCAT」と組み合わせて使えるのが一番の強みですね。
産業用機械をリアルタイム制御するTwinCAT
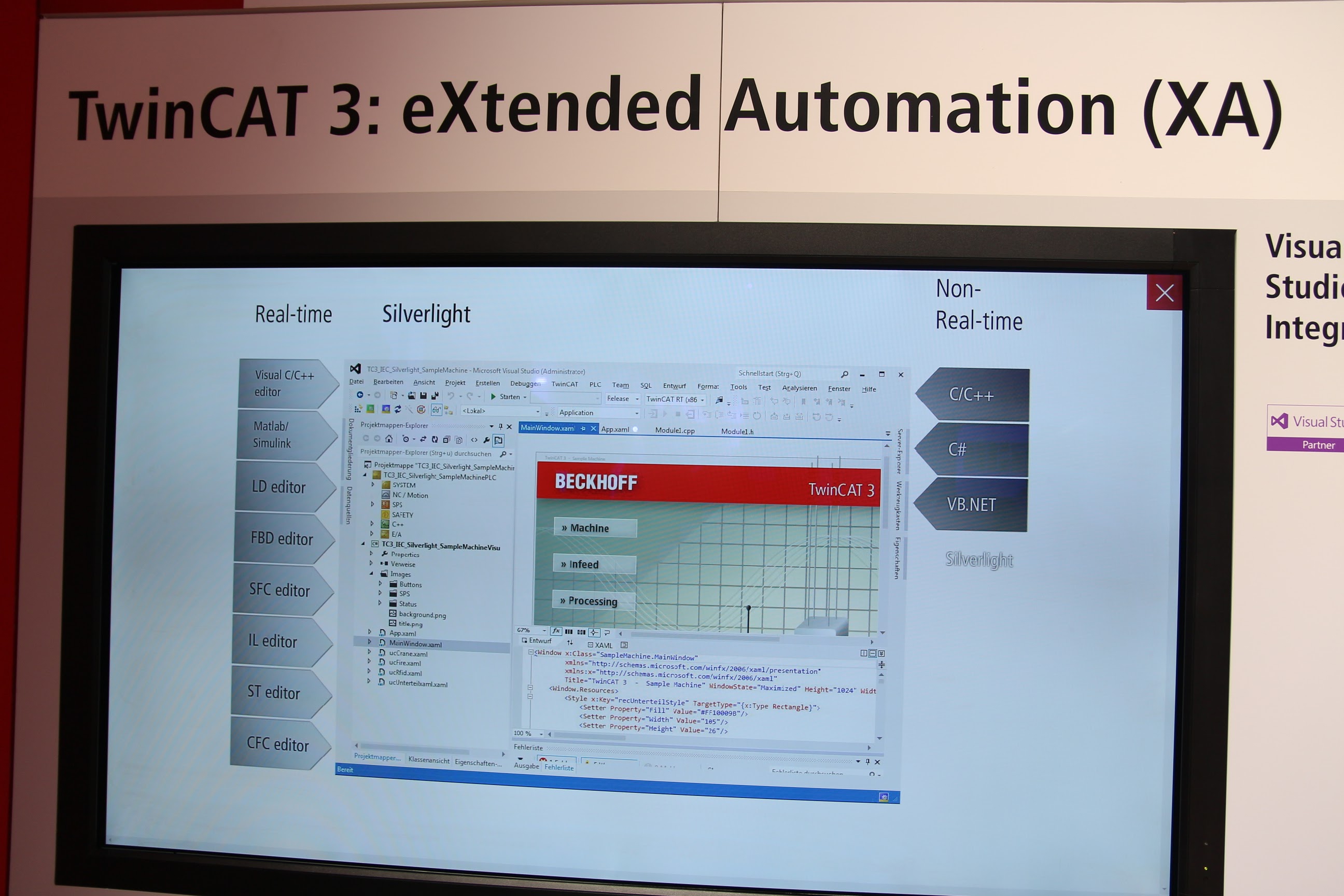
TwinCATは、一言でいうと、Windows上のミドルウェアです。TwinCATをWindowsにインストールするとPLCになったり、NCになったり、CNCになったり、ロボットコントローラーになったりします。
つまり、リアルタイムのアプリケーションを実行できるようにするためのミドルウェアなのです。
ここで、Windowsで動くというところが重要で、普通はリアルタイムのアプリケーションってリアルタイムOSが必要なのです。
—そうですよね。汎用的なOSじゃ無理ですよね。
はい。そこで、リアルタイムOSに対応したプログラミングをするのですが、操作画面のところはユーザインタフェースのあるアプリケーションを作らなければならないから、それはまた別のOSで作ることになります。通常別々のハードウェアが必要になってしまいます。
そこで、TwinCATは、「時間スライス」という考え方で、例えばCPUとかCoreのサイクルや、リソースを一定割合リアルタイムのために確保する設定ができるのです。
例えば特定のコアを100パーセントリアルタイム処理に割り当てると、そのコアはWindowsからは見えなくなってしまうので、リアルタイムの、いわゆるシーケンスプログラムの実行に専念させられます。
コアが一つしかない場合でも、これを例えば8割リアルタイム処理に割り当てると、残った2割のところだけでWindowsのユーザモードのアプリケーションを動かすことができますので、リアルタイム処理と非リアルタイム処理を共存できます。
Windowsの開発をされている方は、.NETや、C#、C++、Silverlightなどを使ってユーザモードのアプリケーションを開発することができます。
また、リアルタイムの方は、ラダーのようなPLC言語、ファンクション・ブロック・ダイアグラム、ストラクチャード・テキストといったIECの標準言語を使って開発することが可能です。
—PLCのプログラミングはスクリプト言語の方が合っていますか?
そうです。向いていると思います。
これが一番開発効率が高いと思うのですが、慣れてない「ラダーがいいな」というユーザもラダーで組むことができます。
他にも、C/ C++言語でリアルタイムなアプリケーションを組みたいとか、MATLAB Simulinkといった研究者がよく使うツールを活用することができます。Simulinkで作ったシミュレーションのモデルをそのままTwinCATにインポートできますので、これを実際にリアルタイムで動かせるのです。
シミュレーションしたバーチャルの世界と実信号を扱うリアルの世界をそのまま直結できるのは俗にいう「デジタルツイン」を実現するために必須の環境です。
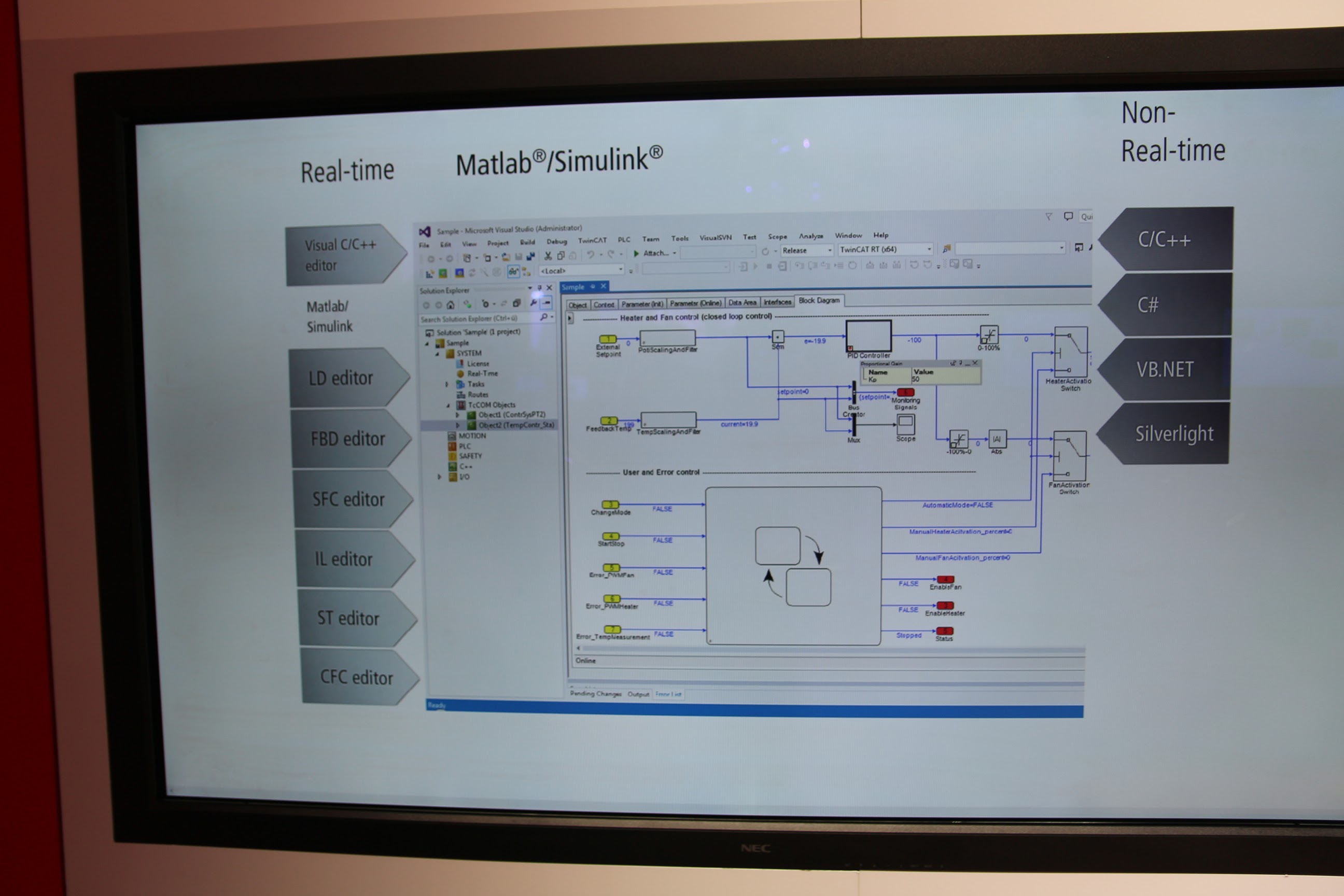
例えばSimulinkで深層学習用のツールボックスを入れておいて、モーターの熱モデルをシミュレーションしたとします。
そして、実際にモーターとそのモデルを同一の制御信号で動作させれば、その挙動を比較することで、モデルの動作が実際の挙動に合うようにモデルをチューニングすることができます。いわゆる深層学習です。
そうして、その学習が収束すれば、バーチャルのモーターモデルは、実物のモーターとほぼ同じ挙動をするようになります。
モータを実機で運用する際に同一の制御信号を実機とモデルに入力し、その応答信号の差分を予防保全の判断基準にすることが可能になります。
—本物は簡単には壊れないですものね。
そうなのです。故障時のデータを大量に準備しないと予防保全ができないのに、滅多に故障しないからデータがほとんど存在しない、という悩ましい課題の解決策の一つになりえます。
—Simulinkすごいですね。
例えば経年劣化がどう起こっていくか?とか、不具合の挙動について、正常時のモーターの学習済みモデルを使うことで、見える化しようというアプローチです。このモデルをリアルタイムに動作させられることがTwinCATの特徴で、いわゆるデジタルツインそのものと言ってもいいかもしれません。
リニアモーターカーの原理で動く高速搬送システム

このXTS(eXtended Transport System)というのが、目玉商品の一つでして、リニアモーターカーの原理で動く、高速搬送システムです。
こういうリニア搬送機は通常可動子と言って、動くところに電磁誘導用のコイルがついていて、そこのコイルに電流流して、磁場を変化させることで、敷き詰めてある磁石からの推進力を受けて動作します。
でもそうすると、全ての可動子がケーブルベアを背負って動かないといけないので、グルグル回したりとか、高速に動かしたりすることが困難です。
そこを逆転の発想で、可動子に永久磁石を配置し、コイルの方をガイドレール側に敷き詰めたのです。
コイルの電流を高速制御することで発生させる磁場を制御し、磁場の変化からマグネットが推進力を受けて動く。だからリニアモーターカーと同じ原理といえます。
こうすると無配線・非接触にできるので、ものすごく早く動かせる。グルグル回しても絡まらないから、サークルの軌道を作れる。
—面白い発想だとは思いますが、なぜ、今までできなかったのですか?
これ実は、この長さ250ミリのモーターモジュールの中に30軸分のモーターのコイルが敷き詰められています。
そうすると1メーターで120軸。4メーターだと480軸。で、このデモ機は5メーターなので600軸分あるのです。
600軸のサーボモーターの位置決め制御サイクルを、250マイクロ秒で同期制御できるネットワークって、EtherCATしかありません。
—なるほど。そこにくると!
そういう話しです。だからこういうユニークなメカを世に出すためにはやはりEtherCATじゃないとできないという世界もあるのです。
—すごく早く動いているのが、ピタッと止まってますもの。
そうですね。機械や装置の機能や性能を向上させるために制御にできることはまだまだ沢山あると考えています。

このデモはワークの一連の作業を全て個別にトーレスしており、RFIDで計測して、カスタムの加工して、最後チェックをして搬出するという、まさにスマートファクトリーのモデルです。
三軸のデルタロボットとか、ドリルステーション、XTSによる搬送など非常に複雑な制御をおこなっているのですが、全てをTwinCATのソフトウェアモジュールを組み合わせることで実現し、ビックアイアン1台に統合しているのがポイントです。コントローラ一台でライン丸ごととか、場合によっては工場丸ごと制御することが可能です。
さらに、IP69Kという高い耐環境性基準を満たすXTSシステムが新製品としてリリースされました。
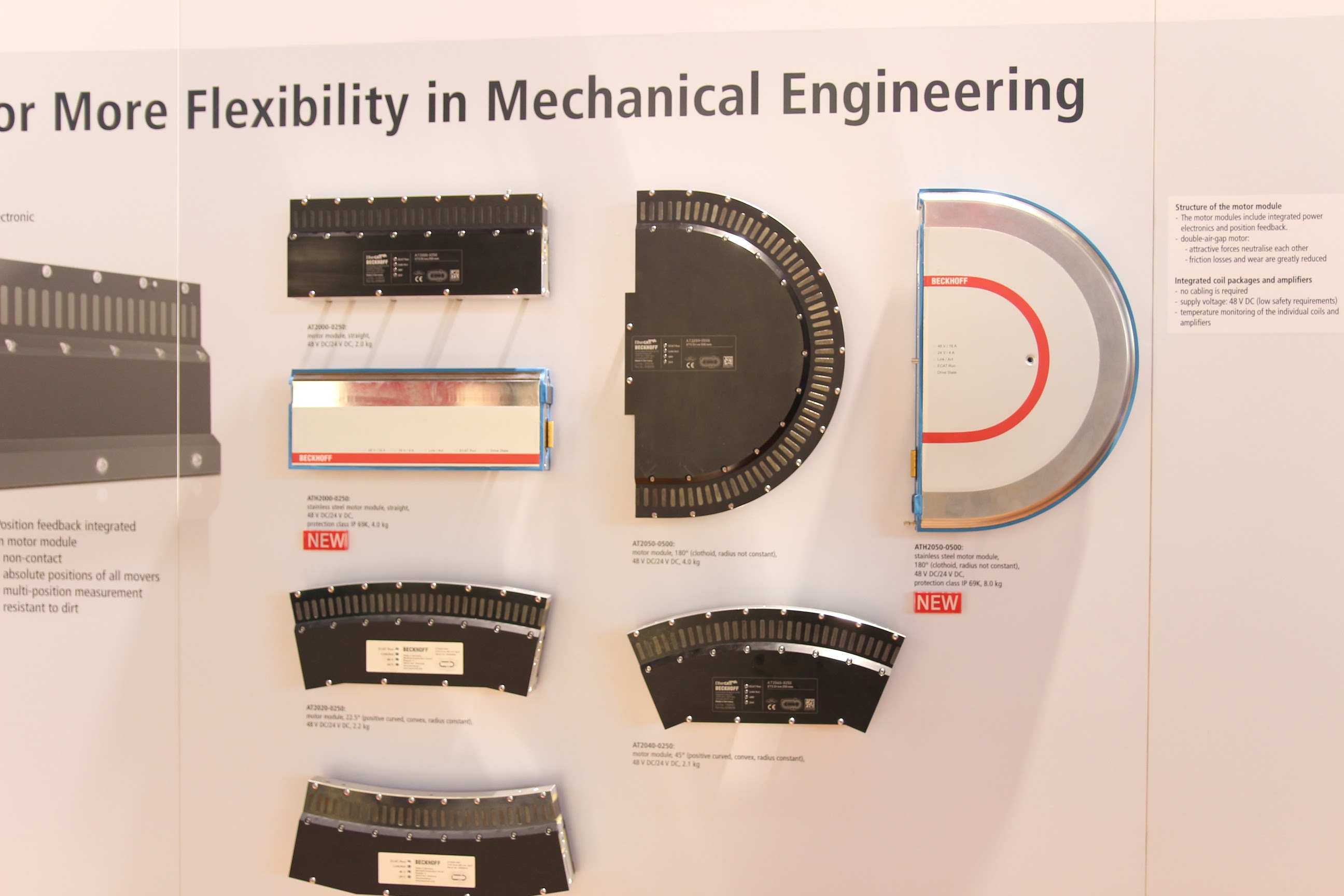
水でもほこりでも油でもそれこそ過酸化水素水で消毒したいとか、高圧洗浄したいとか過酷な環境にも耐えることができます。
食品とか薬品とかの現場では、雑菌が繁殖しないように、過酸化水素水で消毒するなどの衛生基準を満たす必要があったのですが、今まではIP65対応のモジュールしかなかったので、どうしても使えないケースがありました。
今回IP69Kまで対応することができたのであらゆるニーズに応えることが可能になりました。ゴムのパッキンを密着させることで、システムが密封、密閉されるので完全な防水防塵が実現できるようになりました。
—ありがとうございました。
無料メルマガ会員に登録しませんか?


IoTNEWS代表
1973年生まれ。株式会社アールジーン代表取締役。
フジテレビ Live News α コメンテーター。J-WAVE TOKYO MORNING RADIO 記事解説。など。
大阪大学でニューロコンピューティングを学び、アクセンチュアなどのグローバルコンサルティングファームより現職。
著書に、「2時間でわかる図解IoTビジネス入門(あさ出版)」「顧客ともっとつながる(日経BP)」、YouTubeチャンネルに「小泉耕二の未来大学」がある。