



寄稿者: AMO Labs CEO / 工学博士シン・サンギュ
AMO Labsは、IoT・クラウド・ブロックチーェンセキュリティ専門企業のペンタセキュリティシステムズ株式会社(日本法人代表取締役社長 陳・貞喜、韓国本社、ヒューストン/米国法人)の子会社。シンガポールに拠点を置き、ペンタセキュリティシステムズの技術を基に自動車データのブロックチェーンプラットフォームのAMO Marketを開発している。
前回の第1回目の記事では、「コネクテッドカーに求められる要素」ついて説明した。今回の2記事目では、Connectivity(連結性)と自律走行 Autonomous Drivingついて再定義する。
連結性:Connectivity
IoTに分類されるデバイスとそうではないデバイスを仕分ける核心は連結性だ。IoTという文脈の中で最も重要な位置の1つを占める自動車が、従来の自動車と区別される核心的な機能もまた連結性だ。従来の自動車にも連結性がなかったわけではない。スマートフォンをBluetoothで連結して電話したり、音楽を聴いたりするのも連結性だ。モバイルアプリで自動車のドアの鍵を開閉したり、エンジンをかけたりする機能を提供するテレマティクス(Telematics)も通信会社を通じた移動通信を使用する。
一方、コネクテッドカー(Connected Car)と呼ばれる自動車は、従来よりも幅広い連結性を追求する。自動車と自動車の間の通信である「V2V」(Vehicle-to-Vehicle)、自動車と道路などのインフラ間の通信である「V2I」(Vehicle-to-Infra)、自動車と電力網の間の通信である「V2G」(Vehicle-to-Grid)、自動車とモバイル機器間の通信である「V2D」(Vehicle-to-Nomadic Device)、自動車と家を連結する「V2H」(Vehicle-to-Home)などがこれに該当する。
自転車、二輪車などの交通手段や歩行者との通信であるV2P(Vehicle-to-Pedestrian)も新しい通信モデルとして浮上する。自動車メーカーは、テレマティクスを通じた断片的なサービスよりも、さらに幅広いサービスの実現に向けてクラウドやオンラインサービスとの連結を提供できる通信モデルを準備している。この通信モデルは、「V2N」(Vehicle-to-Network)、「V2S」(Vehicle-to-Service)、「V2C」(Vehicle-to-Cloud)などの名称で呼ばれている。


V2Gモデルは、前述した「電化」で説明したように、電気自動車が充電器を通じてセカンダリーアクター(Secondary Actor)と連結されるサービスを反映したものだ。V2Hモデルで主導権を先取するため、サムスン電子などの家電メーカーはスマート冷蔵庫やスマートテレビと自動車との連結を試みている。フォルクスワーゲン(Volkswagen)は、2016年のCES展示会でLG電子の冷蔵庫と連結するシナリオに沿った展示をした。
最近は、音声認識機能を搭載したスマートスピーカーの躍進が目立つ。これをリードするのは、Amazonの「Alexa」(アレクサ)だ。2018年のCESでは自動車だけでなく、IoT機器をAlexaと連結した製品がたくさん展示された。Alexaとアマゾンのクラウドサービスを媒介に、自動車とIoT機器、家が連結されるシナリオが自然に完成された。類似の試みは、アップルの「CarPlay」(カープレー)やグーグルの「Android Auto」(アンドロイドオート)でも、それぞれのクラウドサービスを通じて行われている。
各国政府が興味を持つ分野は、V2VとV2Iモデルだ。V2V通信を通じて車両間の衝突事故を、V2I通信を通じて安全運転に必要な交通情報を提供することで交通事故を減らし、安全性を高めることを目指す。米国、欧州、日本、中国、韓国で推進される次世代交通システム「C-ITS」(Cooperative Intelligent Transportation System、協調型高度道路交通システム)事業は、V2VとV2I通信を基盤にして交通システムを革新するものだ。今後のV2Pモデルも次世代交通システムに反映されると予想される。
自動車メーカーがリードするV2CやV2S、V2Hモデルを通じて、自動車は単なる移動手段から、さまざまなオンラインサービスを活用する新たな空間として価値を高め、新しい事業の創出が期待されている。これはSPACEの中の「プラットフォーム」部分と大きな関連性を持つ。
よく自動車の未来像を「スマートカー」(ここにはコネクテッドカーも含まれている)だという。自動車がスマート機器の一つになるということだ。私たちが既に持つスマート機器が一つが「スマートフォン」だ。スマートフォンに連結性がない、特にインターネットにつながらないと仮定してみよう。恐らく「どうやって使ったらいいか」で悩むことになるだろう。新たなスマート機器であるスマートカーも同じだ。自動車がスマートカーに進化するためには連結性が必要なのだ。
自動車の安全度を高めたり、活用度を高めるために連結性は重要な役割をするが、連結性を持つために通信チャネルが公開されることはセキュリティ上の脅威とも共存することになる。信頼できない主体が生成した誤った情報が自動車の運行を妨害したり、露出した通信チャンネルを通じてクラッカーに攻撃されたりするだろう。自動車の制御を乗っ取られるかもしれない。 情報漏えいなどのセキュリティ事故は金銭的な被害で収まる。だが、自動車のセキュリティ事故は人の生命と安全に直結する。それ故にセキュリティの重要度が非常に、いや、最も高くなる。自動車を外部と安全に連結するためにはセキュリティの課題は必ず解決しなければならない。
次ページ: 自律走行は、既に未来の技術ではない
自律走行は、既に未来の技術ではない
自律走行は、未来を描いたドラマや映画でおなじみ技術だ。だが、自律走行は既に未来の技術ではない。船舶や飛行機では一部でオートパイロット(自動操舵)を使って運航されている。決められた航路に沿って自律走行をする船舶や飛行機と違い、自動車は急変する道路状況に対処しなければならない。そのため自律走行の適用が簡単ではなく、未完の技術として研究が重ねられている。
たくさんの企業が巨額の資金をつぎ込んで自動車向けの自律走行技術を開発している。自律走行自動車の交通事故で死亡者が発生したという記事も主要なニュースとして取り上げられている。
自律走行技術のレベルを定義した「SAE J3016」では、自動運転レベルを0から5までの6段階に分け、レベル3以上を技術を搭載した自動車を「自律走行自動車」(Autonomous Vehicle)と見る。

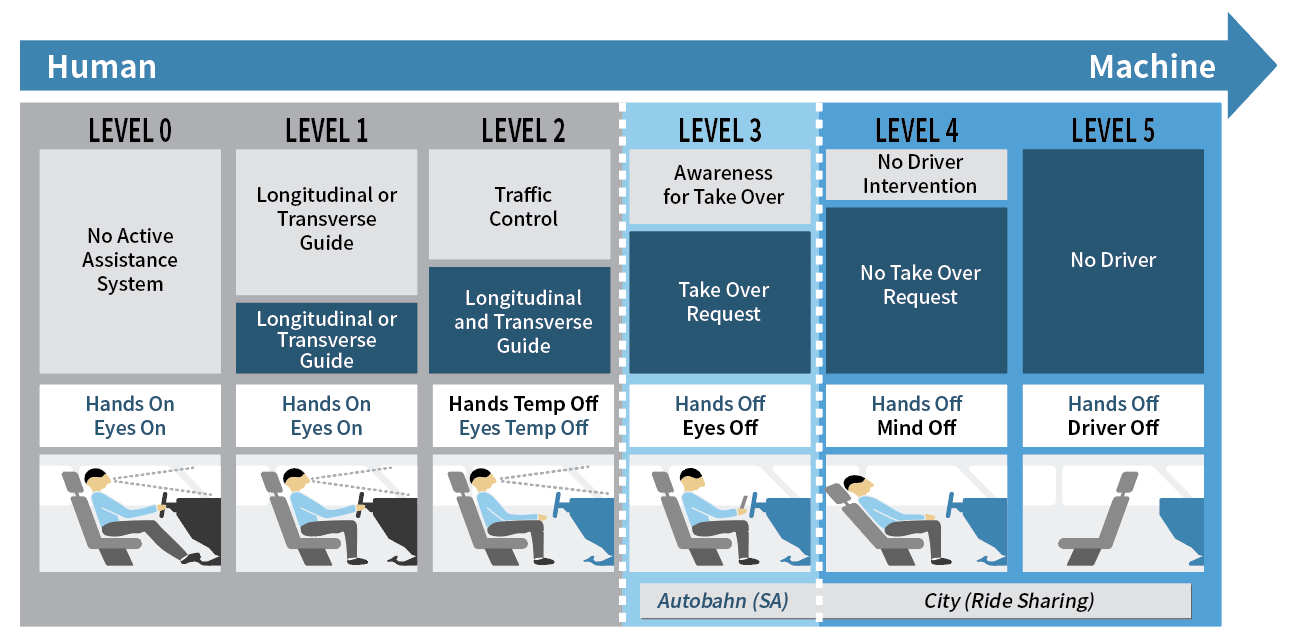
ある自動車メーカーはレベル3の技術を開発したといい、別のある自動車メーカーはレベル4の技術に成功したという。果たして、レベル4の技術はレベル3よりも優れたものなのだろうか。そうかもしれないし、そうではないかもしれない。
米国運輸省(DoT、Department of Transportation)傘下の道路交通安全局(NHTSA、National Highway Traffic Safety Administration)が2016年に作成した「Federal Automated Vehicles Policy」では、「ODD」(Operational Design Domain、運行設計領域)という概念を自律走行の構成要素に含めた。


ODDは、自律走行が動作できる条件である「地理的位置」「道路類型」「走行速度範囲」「天気」などの制約を含む。ODDが同一であれば、レベル3の技術よりもレベル4の技術の方が優れた技術であることは間違いない。だがODDが異なれば、どの技術がより優れた技術なのかを判断することは容易ではない。快晴でドイツのアウトバーンを走れるレベル4の技術と、可視距離が数十メートルしかない大雨の状況でも都心の繁華街を走れるレベル3の技術を比較するのは難しい。
NHTSAの文書は、自律走行自動車が順守すべき技術の要素として「サイバーセキュリティ」(Cyber Security)を明示している。自律走行とセキュリティにはどんな関係があるのだろうか。
自律走行自動車は、自動車に搭載されたカメラ、レーダー(Radar)、ライダー(LiDAR、レーザー光による検知と測距)、赤外線センサーなどのさまざまなセンサーを通じて周辺を認識して、どのように走行するかの判断をリアルタイムでする。センサーから収集したデータを分析し、リアルタイムで判断することがまだ未完の技術であり、悲劇的な事故の発生につながることもある。2016年に発生したテスラの交通事故は、左折する白いトレーラーの横面と空を区分できなかったせいで発生した事故だった。(※1) それなら、クラッカーがセンサーの正常動作を妨害したり、信号をかく乱したりして、自動車が誤った判断を下すように誘導することも可能ではないか。
人間は真正面から強力な光を当てられると、しばらく前が見えない状態になる。同じように自動車のカメラに強力な光が照らされると、自動車はすぐ前の障害物も識別できなくなる。このような攻撃は高価な装備や高度の技術が必要なものではない。性能の良い電灯や大きな鏡だけで実行できる犯罪だ。
車両の内蔵センサーだけでは、周辺の状況を正しく判断することに限界がある。だからこそ、自動車が周辺の自動車や道路と情報をやりとりしながら自律走行をするのだ。このような自律走行を「自律協力走行」という。「連結性」で説明したV2VとV2Iが自律協力走行でも使用されるのだ。外部との通信を通じて周辺状況の情報を得るためには、通信相手に対する信頼を検証し、通信チャンネルの信頼可否を検証することが必要になる。
自律走行で使用される、また違う形の通信がある。自律走行タクシーを運営するタクシー会社を想像してみよう。タクシーを利用しようとする乗客がタクシー会社に要請すれば、タクシー会社は所有するタクシーの中から特定のタクシーに利用客の状況を伝えなければならない。それ以前にタクシー会社はタクシーの現状をリアルタイムで把握し、顧客の需要が多発する場所にタクシーを移動させておくことも必要だろう。この場合にV2NもしくはV2Cモデルの通信を利用することになる。自律走行自動車は外部通信を活用するためのセキュリティも確保しなければならないのだ。
※1 Tesla car on autopilot crashes, killing driver
第3回目につづく。
第1回目: コネクテッドカーに求められる要素とは? 第2回目: 自律走行車やコネクテッドカー時代に向け必要なもの(この記事です) 第3回目: ネットと繋がる未来の自動車、その活用分野