


ダイナミックマッププラットフォーム株式会社は、経済産業省による「公共エリア向けダイナミックマップの開発」の研究開発事業を受託したことを発表した。
「公共エリア向けダイナミックマップの開発」では、自動車を含めた様々な自律移動モビリティが運行できる環境整備を行うことを目的とし、空港および港湾施設において、自動走行車両の運行を目指すものだ。
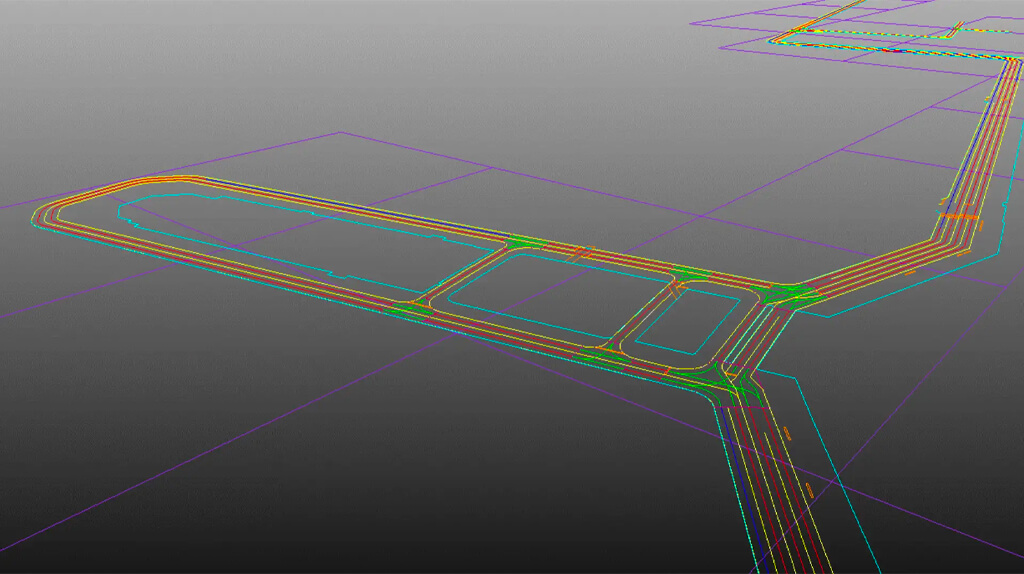
空港敷地内は、航空機や各種作業車両、重要設備などとの接触を避けるため、厳格な走行ルートが規定されているほか、センサによる自動走行に必要な白線等の地物が少ない。
そこで、高精度3次元データをベースに開発したダイナミックマップにより、正確な仮想の走行ルートを指定することで、自動走行車両運行実現を目指す。
港湾施設は、コンテナ輸送など、港湾を利用する物流に活用されており、港湾施設から一般道、高速道路を利用した物流ネットワークが構築されている。
そこで、港湾施設内のダイナミックマップと、ダイナミックマッププラットフォームが持つ高速道路や一般道の高精度3次元地図データを連携させることで、公共エリアから公道までを移動できる自動走行サービスの実現を目指す。
なお、今回の研究において得られた成果については、公共エリア向けダイナミックマップの国際標準化など、グローバル展開も目指しているのだという。