


パイオニアは、自動運転・高度運転支援向けに必要とされる走行空間センサー「3D-LiDAR(ライダー)」の原理検証試作を完了し、高性能・小型・低コスト化に向けて開発及び車載実証実験を開始した。
2016年中に高度化地図の整備車両向けに実用化し、2017年には業務用製品、2018年頃から一般車両向け「3D-LiDAR」の製品化を目指す。
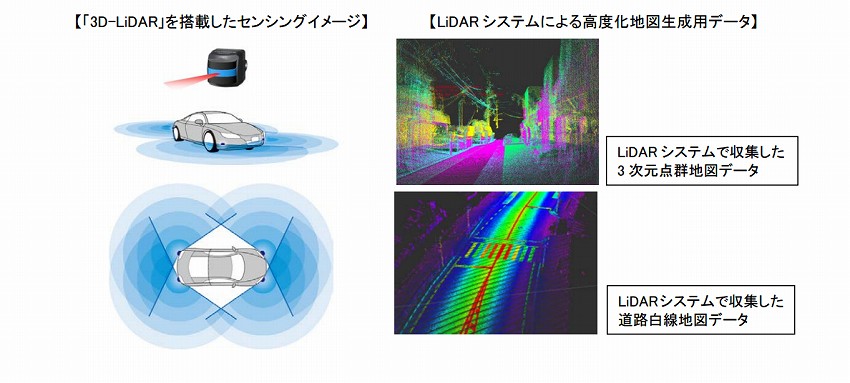
具体的には、地図整備子会社インクリメントP株式会社(以下、インクリメントP)とともに、2016年中に「3D-LiDAR」を搭載した地図整備車両による高度化地図の整備に着手し、近い将来、「3D-LiDAR」を搭載した一般車両からも周辺情報をリアルタイムに収集して地図データを差分処理する、低コストで運用可能な「高度化地図データの効率的な整備・運用システム(データエコシステム)」を構築、提案する。
近年、自動車の周辺情報を検知して事故を予防する車載用センシングシステムなど、安全・安心をサポートするための車載機器の開発が大きく進展している。今後ますます高まる安全・安心で快適なクルマ社会への期待から、自動運転に必要な「高度化地図」と、自車位置・周辺情報をリアルタイムに把握するための「センサー」、それらの情報を随時更新・配信する「ネットワークシステム」などの検討、開発がさまざまな分野で進められている。