



ファクトリービルダーである、FAプロダクツがプロデュースする、最新の製造業におけるロボット利活用が見られる施設、「スマラボ」。この施設を見ることで、前編で紹介したファクトリービルダーが考える、製造設備の在り方を具体的に見ながら、実態に合わせた検討・検証ができるという。
今回、この施設をIoTNEWSの八子と小泉が訪問して、スマラボをオフィスエフエイコム、ロボコムと共同運営するFAプロダクツ代表取締役会長の天野眞也 氏と、高見守 氏にお話を伺ってきた。
カゴ車デパレタイジングシステム

これはいわゆる「自動荷下ろし機」だ。段ボールのサイズや置き場所がランダムであっても、カゴ車デパレタイジングシステムの上についているサイズや場所がランダムであってもカメラで判断し軌跡を自動計算し、掴んで運ぶことができる。

これでシステム的には3千万円くらいで組めて、人だと1時間600個運べるところ、このシステムでは400個ぐらいとなるので、投資対効果合わないと思われる方もいる。しかし、ペットボトルや缶などの箱を移動するになると、10何キロという、人が持つには重いものに使うにはとても実用的だ。
今後、数がでれば今後価格も下がっていく見込みがあるということだ。
次ページは、「3Dトラッキング物流仕分けシステム」
3Dトラッキング物流仕分けシステム

3Dトラッキング仕分け、文房具をたくさん売っているような物流をイメージするとよい。
コンベア上であれば、モノをどこにおいても止めずに取り上げることができるというところがポイントになる。また、モノの高さがまばらな場合でも、2次元カメラと3次元カメラの組み合わせることで、サイズ違いのものを認識し、ワークを見分けて天吊型のハンドが取っていくのだ。


さらに、このロボットアームパッケージは、フレームを共有化しているので、後述するおにぎりのラインでも、まったく同じ筐体を使用することができている。

筐体全体に稼働用のクルマがついているので、手で動かして場所を移動することも可能だ。
次ページは、「自動搬送台車(AGV)による搬送システム」
自動搬送台車(AGV)による搬送システム

この展示は、下の磁気テープを検知して走るタイプのAGVだ。上に200キロほどの荷物を載せることができ、牽引の場合500キロのモノを引っ張ることができる。
実は、このAGV、エクセルで簡単にプログラムが作れるのがポイントだ。
磁気テープの位置でどこまでいったら左に曲がる、などをエクセルで指示するだけで動く。さらに、レーザーセンサーを使ってぶつからないようにもなっているということだ。プログラムがわからない担当者でも利用できる。

次ページは、「画像嵌めあい同期制御システム」
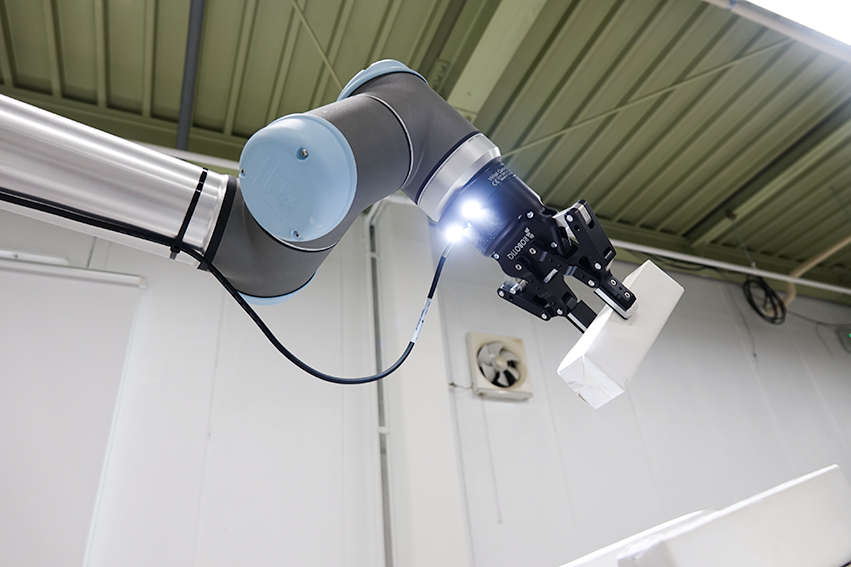
画像嵌めあい同期制御システム

この展示は、ランダムできた二つの部品を1回目撮影で位置を検知し、その後二台のロボットでそれぞれの部品を取り、自分で取った部品の位置をもう一度カメラで見て、2つを嵌合(かんごう:部品などのはまり合い)し、協調動作に入る、といったロボットだ。





この展示では、「冶具レス」の現場のイメージだという。例えば自動車のシートのフレーム溶接では何十、何百と冶具が必要になる。しかし、これは片手で持って、もう片手でアプローチするというものなので、冶具がなくても片方のロボットが持っているものに対して、もう片方がアプローチしていけば、冶具レスでなんでも作れるというものだ。
溶接や機械加工では冶具がたくさん必要になるが、このソリューションを使うことで冶具を減らすことができ、少量多品種の生産ラインに柔軟に適用できるようになる。
次ページは、「外観けんた君」
外観けんた君

この展示は、外観の検査、いわゆる傷検査で使うものだ。凹みを見てNG品を見つけると、NG回収ボックスに入れていく。
正常品に関しては整然と並べるのに、NG品は転がすというところが面白い。(ちなみに、ロボットアームの制御としては、どちらでも制御できる)



次ページは、「3Dばら積みピッキングとデジタルツインデモシステム」
3Dばら積みピッキングとデジタルツインデモシステム

この展示は、ファナックのロボットとカメラをつかって、デジタルツインを組んでいるものだ。
上部のカメラでモノの位置や角度を認識し、ロボットアームがそれをとり、ラインに並べる。

デジタルツインは、リアルで起きている様子をそのままデジタルでも再現できるし、逆にデジタルツイン上の動きをリアルでも再現することができる。
次ページは、「振動予知保全システム「Siluro(シルーロ)」」
振動予知保全システム「Siluro(シルーロ)」

IoTで設備の振動観測と分析を行い、予知保全をするものだ。観測に特化したエントリーモデルは価格が19万8千円〜で導入することができる。装置が止まるのは7大ロスといって、止まる要素がだいたい決まっているので、そこに絞り込んだ安いパッケージを展開しているのだという。
振動の予知保全システムは正規の動きと異なる振動になると、それが正常状態と異なる、と判断。それを独自のアルゴリズムによって、「劣化指標」を作る。
壊れた時のデータを取ろうとすると、新品のものが壊れるまで何年もかかり、一向に予知保全にならない。そこで、正常状態を覚えさせておいて、それと違う振動になった場合に検知するのだ。
この手のモーターの場合、壊れるのは軸受の回転の部分などが多い。そこで、加速度方向に加えてジャイロ方向の動きがわかる6軸センサーで検知しているのだ。経験的には軸受けが壊れるなどの場合、ジャイロ方向の成分で検出できるケースが多いのだという。

意外にセンサーとソフトウエアが一緒に売っているものがないところで、両方一度に手に入るというところもユニークだ。
次ページは、「ORiNでシステム統合した3Dピッキングシステム」
ORiNでシステム統合した3Dピッキングシステム

この展示は、ORiNで全体を通信させている。ORiN(オライン)とは、Open Resource interface for the Networkの略で、日本ロボット工業会が規定している、工場内の各種装置に対して、メーカ、機種の違いを超え、統一的なアクセス手段と表現方法を提供する通信インターフェースだ。(ORiNホームページより)
この展示では、キヤノンのカメラとデンソーのロボットを動かしていて、PLCを使わず、IPCで制御している。この構造にしていることで、クラウド上にデータをアップロードしやすくなっているということだ。
次ページは、「協働型ロボ+AGVシステム」
協働型ロボ+AGVシステム

この展示は、製造された製品の箱を、置き場に置いていくイメージのものだ。化粧品や医療品、歯磨き粉など、モデルチェンジの激しいものを製造する際に活躍するソリューションとなる。
生産指示がMESから降りてきても、製造データと、できてきた製品の付け合わせを人が行うと間違えが起きやすくなる。また、市場に投入後うまくいかないと、すぐモデルチェンジが入り、生産終了してしまうものだ。
モデルチェンジになると、新たにバーコードが採番されるのだが、包材が見かけ上区別がつきにくいなどの問題があり、作業ミスが起きやすいという実情がある。
そこで、ロボットアームに着けられたカメラが全てバーコードで見せて、指示とあっているかを見る。
そして、AGVが置き場まで運ぶ。こういった検査システムを中小企業に一貫システムで入れようとすると、「スペース的に入らない」ということがある。そこで、スペースをうまく使うために、AGVと組み合わせているのだ。

この機械自体は、周囲にセンサーがついていて、周りの壁との距離で走るタイプのものだ。動作精度は磁気テープのAGVより少し劣るものの、ロボットハンドの先端にカメラがついているので、置き位置がずれない。
次ページは、「食品向け画像異物検査システム」
食品向け画像異物検査システム


この展示は、学習能力がついた、画像認識機械だ。食品に髪の毛が付いていたりしないかを検査するものとなる。

弁当のおかず詰め込みロボット

コンビニの弁当で、おかずをロボットで詰め込む場合、食品衛生法上1つのハンドでは1つのおかずしか掴めないので、ハンドを切り替えながら詰めなければならない。

また、お弁当は、固形のものばかりではなく、ひじきやキャベツなど、グラムで乗せるものに対して重さで測り、詰めていく必要がある。そこで、ロボットアームの上部にロードセルがついていて、持ったものの重さを常に測っているのだ。

食品産業における、自動化のニーズは、労働環境が非常に厳しいことに起因する。お弁当やおにぎりを詰めている工場というのは、通常冷蔵庫くらいの気温となる。また、深夜・早朝の出荷にあわせた生産も多くシフト制を採用している工場も多い。
労働環境が過酷なため、どんどん労働者が集まらなくなってきていて、自動化が必要となっているのだ。
次ページは、「移動式おにぎりばんじゅう詰めシステム」
移動式おにぎりばんじゅう詰めシステム

これが、先ほどの3Dトラッキング物流仕分けと同じロボットが使われている展示だ。
3台あるロボットは、無線で通信している。AGVに積載されたロボットシステムと同様、この展示では、四角くレイアウトしているが、長いレイアウトやL字のレイアウトなど、スペースに合わせて組めるようになっている。
通信し、ロボット同士が同期しているため、狭い空間上に配置されていても、ロボット同士がぶつからないのだという。
ロボットの稼働頻度が3台とも違うので、1台目は動く量が多く、2台目、3台目になるに動きが多くなくなる。そこで、3台も買えないという場合、1台目と2台目だけを買う、ということにも対応しているのだという。






同じハンドを使うことで、コストダウンが図れる。フレームも全部一緒なので、100台単位で発注するとロボット1台当たりの単価は安くなる。その結果、加工品の単価というのが下がるのだ。
次ページは、「モデルレス3Dピッキングシステム」
モデルレス3Dピッキングシステム

この展示は、「フロチル(フローズン・チルド)商品」といい、食品が冷凍から冷蔵に変わる商品の賞味期限印字工程をイメージしている。冷蔵に代わる際に賞味期限を印字する必要があるためだ。この工程は、お弁当ラインよりさらに過酷で、0度に近い環境となる。
過酷なため、働き手も少なくロボット化が急務となっている分野だ。


下にレーザースキャナが入っていて人を感知しているので、人が緑のラインの近くに行くと、動きが遅くなる。
