



2019年7月2日に品川で開催された「SORACOM Discovery 2019」内にて「ロボットとサービスを融合するための通信と認証~Honda RaaS Platformの事例~」と題された講演が開かれた。
講演では本田技術研究所ライフクリエーションセンター・ロボティクス開発室・プロジェクトリーダーの東治臣氏と、同研究所の研究員である西宮憲治氏が登壇し、研究所が進める「Honda RaaS Platform」について発表した。
「Honda RaaS Platform」とは
「Honda RaaS Platform」とは何か。これについては、本田技術研究所・東氏が概要を説明した。


RaaSとは「Robot(Robotics) as a Service」の略称であり、ロボティクスの機能をネットワーク経由で利用するサービス形態のことを指す。
「Honda RaaS Platform」とはロボティクスサービスを開発・運用する機能をクラウド上で提供するプラットフォームであると、本田技術研究所・東氏は語る。
ロボティクスサービスの機能をクラウドを介して提供するメリットとは何か。それについて東氏は、ロボット開発者が高負荷の処理をクラウドにオフロード(システムの機能を部分的に取り出して、外部システムに渡すこと)ができること、ロボット運用者が複数台のロボットを管理運用できること、の2点をあげた。

東氏は複数のロボットを動かす例として、開発中のお茶出しサービスが紹介された。
これは注文を受けるロボット、お茶を掴む・渡すロボット、お茶を運ぶロボットと役割が分担されたロボットを同時に動かし、ロボット同士が協調して作業を行うように制御するというもの。

講演では注文の受付から、お茶を客席に運ぶまでの一連の流れを動画で公開した。
まずはコミュニケーションを専門とするロボットが客席へ行き、お客様から「お茶を持ってきてください」と言われると注文を受け付ける。
次にアームロボットがカメラでお茶のペットボトルを認識し、お茶を掴む動作を行う。
最後にお茶を運ぶ専門のワゴンロボットがアームロボットからお茶を受け取り、客席までワゴンロボットがお茶を運んでいく。上記の画像はアームロボットとワゴンロボットが協調してお茶を受け取る場面である。

上記の画像は、お茶出しサービスのロボットが現在どの位置でどのように稼働しているのかをモニターしている画面。各ロボットの状態を判断しクラウド経由で指示を出す形でロボット同士の協調を制御しているという。
次ページは、「「Honda RaaS Platform」実装の仕組み」
「Honda RaaS Platform」実装の仕組み
東氏による「Honda RaaS Platform」の概要説明があった後に、モデレーターであるSORACOM・ソリューションアーキテクトの今井雄太氏を交え、パネルディスカッション形式で「Honda RaaS Platform」の仕組みなどについてトークが進んだ。

今井氏が提示した1つ目の疑問は「Honda RaaS Platoformはどのように実装されているのか」ということ。これについては、下記のような図を用いて東氏が説明した。
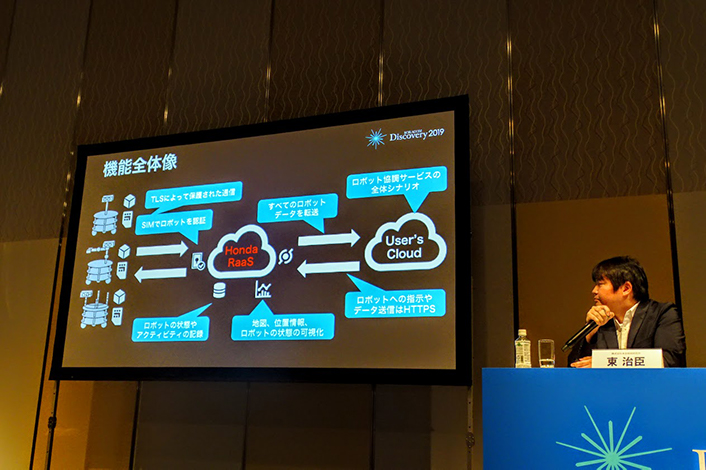
まず各ロボットから稼働状況や位置情報などのデータを吸い上げ、「Honda RaaS Platform」上でロボットの状態を可視化。そして全てのロボットデータをユーザー側のクラウドに上げ、ユーザーはロボットを利用してどのようなサービスを提供するのかをシナリオを構築する、というのが流れであると、本田技術研究所・東氏は語った。
そもそもロボットはどのように動いているのか
続いて今井氏が出した疑問は「そもそもロボットはどのような仕組みで動いているのか」という、基本的なことを確認するもの。
これに対して本田技術研究所・東氏は「ロボット用の通信ミドルウェアを利用している」と答えた。
ミドルウェアとはコンピューター上において、アプリケーションソフトとOSなどのシステムプログラムの中間に位置するソフトウェアのことであり、複数のコンピューターやプロセッサーを利用して分散処理を行う際に、アプリケーション同士の同期など複雑な処理を総合的に担うもの。

ロボットはこのミドルウェアを介してコマンドが流れることで動いていると、本田技術研究所・東氏は述べた。
次ページは、「ロボット開発の環境はどう変わるのか」
ロボット開発の環境はどう変わるのか
3番目の議題はロボット開発・運用にはどのような問題があり、「Honda RaaS Platform」はその問題をどう改善したのか、ということ。
本田技術研究所・東氏はWi-Fi通信で稼働エリアが限られること、ネットワークと開発環境が分断されていること、複数の開発環境でオンサイト(現場)要員を位置するのが負担になっていることなどを問題点として述べた。
その上で「Honda RaaS Platform」において、それらの問題がどう変わるのかについても説明した。
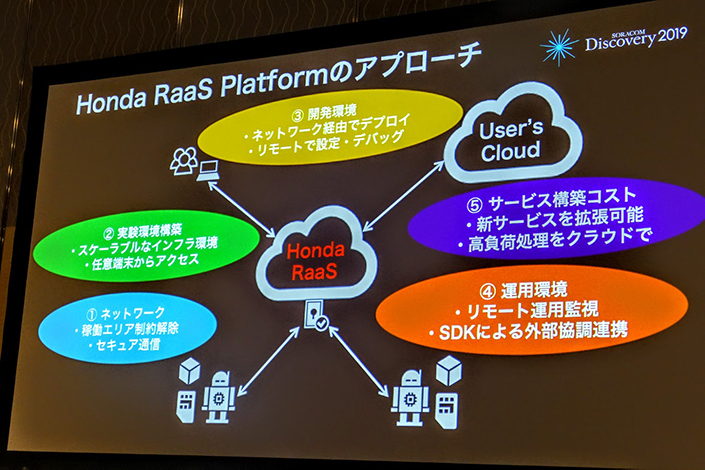
まず稼働エリアの問題については、セルラー通信を使うことによってエリアの制約から解放することができたという。また、クラウド上でのやり取りによって、ネットワークを介してシステムを共有するなど、開発環境の分断にも対応することができる、と東氏は語った。
SORACOMのサービスで何が変わったのか
4つ目の議題は「SORACOMのサービスを使うことで、ロボット運用に変化はあったのか」。
「Honda RaaS Platform」では各ロボットの稼働状況を吸い上げる際に、SORACOMの提供するサービス「SORACOM Beam」を利用している。
「SORACOM Beam」はIoTデバイスにかかる暗号等の高負荷処理や接続の設定を、クラウドにオフロードできるサービスだ。

この議題については、本田技術研究所・西宮憲治氏が「セキュリティ性が高く、ロボットを乗っ取られる心配などがないこととと、セルラー通信を利用することでエリアの制約を受けないこと」と答えた。
次ページは、「クラウド制御におけるリアルタイム性と今後」
クラウド制御におけるリアルタイム性
5番めの議題は「ロボットをクラウドから制御しようとした際に、リアルタイム性に問題はないのか」ということ。
これについては西宮氏が「遅延などが発生するのはある程度想定して設計している。例え回線が切れても多少は動けるような仕組みは作っておく」と答えた。
東氏は「様々なユースケースが対応できるように、アーキテクチャを構築していきたい」と述べた。
今後のロボット運用・開発
最後の議題は「今後ロボット運用・開発を進める上で、SORACOMやセルラー通信に対する要望はあるか」ということ。

これについて本田技術研究所・東氏は「これからはより高度で複雑な処理をクラウド上で求められるようになる。ローカルエリア内での通信をできるだけ短くして、出来るだけ沢山のリソースを基地局側で使えるようなインフラを通信会社には整えてほしい。」と述べた。
講演の終わりには5Gによる超高速・低遅延の話題が出たことに絡んで、本田技術研究所・西宮氏から「今後のロボット開発では遠隔操作をよりスムーズに行えるようになりたい。万が一、ロボットに不具合が生じても、ロボットの周りにいる人間と遠隔から円滑にコミュニケーションを取り、問題を解決できるような環境が出来れば良いと思う。」という意見が出た。