



昨今移動ロボットの活用が進んでいる一方、異なるメーカーのロボットは位置情報などが共有できず、立ち往生してしまうといった課題がある。
そこで株式会社東芝は、NEDOとともに、メーカーや種類が異なる複数の移動ロボットの運用を共通の運行システムで可能とする移動ロボットインターフェースを策定し、インターフェースの標準化を進めている。
そして本日、複数の移動ロボットを直接通信でつなげることにより、相互回避や協調搬送を可能にする協調連携システムを開発したことを発表した。
このシステムでは、運行システムを介さず、移動ロボット間で直接通信するプロトコルを定め、ロボット間の通信経路を切替えることで、移動ロボット同士が直接リアルタイムで情報を交換することができる。

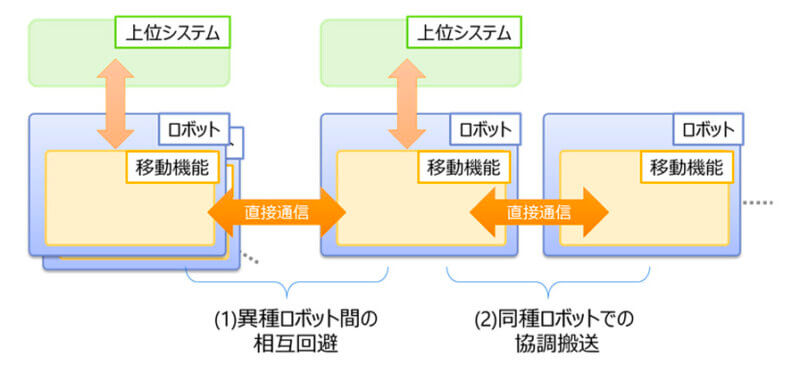
直接通信を低遅延で実現する無線LANマルチホップ方式で実装しているため、複数の同種の小型移動ロボットによる、大きな荷物の協調搬送も可能となる。
なおこのシステムを活用した実証は、深川江戸資料館で実施した芝浦工業大学のロボット連携実験の一つの実証実験として行われた。
また東芝は、同技術の詳細を9月14日から17日にかけて開催される2021年電子情報通信学会ソサイエティ大会にて発表するとしている。