



従来のカメラシステムに頼ったロボットハンドでは、クッキーや煎餅、薄型の樹脂成型品、金属部品のような一部の繊細なプロダクトに関しては、対象物に対する距離感の把握が難しいことから、破損や損壊などを引き起こすことが少なくなかった。
そこで株式会社Thinkerとユアサ商事株式会社は共同で、近接覚センサーを活用して、繊細なプロダクトにに最適な独自のロボットアームシステムを開発した。
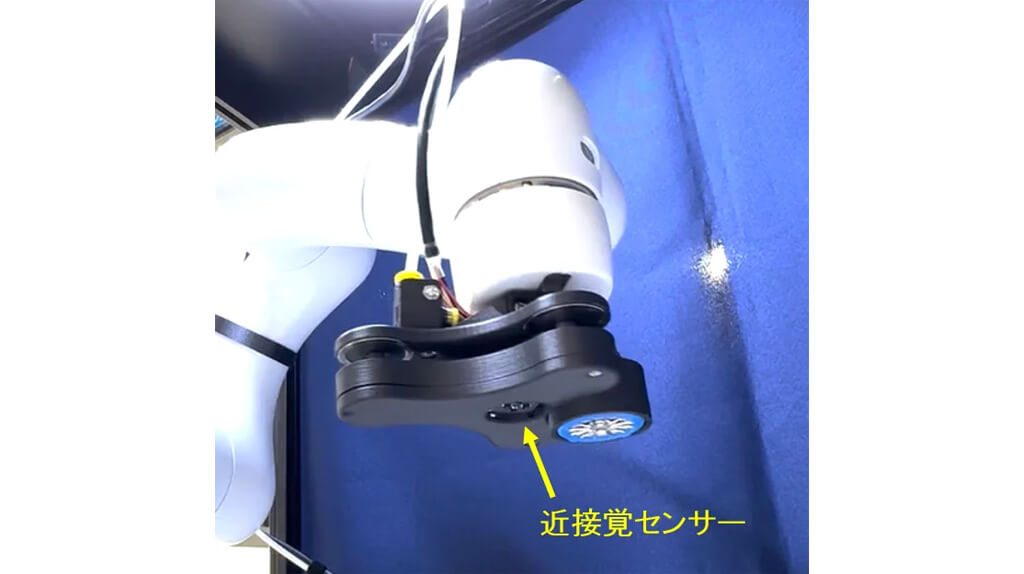
このロボットアームシステムは、吸着パッドを用いつつ、その場でそのつど非接触のまま対象物の距離や姿勢を把握できるThinkerの「近接覚センサー」を活用することで、破損や損壊リスクを軽減している。

今後は、製造現場での実証試験を経て仕様を確立し、早期の製品化を目指すとしている。
なお、近接覚センサーを用いたこのロボットシステムは、2024年7月5日〜6日に開催される「関東グランドフェア2024」で展示され、煎餅のばら積みピッキングのデモンストレーションを実施する予定だ。
[ロボットアームシステムの紹介動画]
