



2019年11月15日、Mobility Transformation 実行員会主催、MOBILITY TRANSFORMATION CONFERENCEが虎ノ門ヒルズにて開催された。当カンファレンスのテーマは「移動の進化への挑戦」。20以上のセッションとライドシェア、自動運転といった新たなモビリティサービスに関わる企業やプレイヤーがカンファレンスで登壇した。今回はそのイベントレポート第二弾となる。
基調講演のひとつであるアカデミック・パネルディスカッションにおいては、「移動の進化への挑戦」というテーマのもと、自動運転技術の進化や自動運転に関する法規制ならびに法整備の現状、取り組み等を取り上げた。
登壇者
- インテル株式会社 事業開発・政策推進ダイレクタ兼 チーフサービスアーキテクト 野辺継男氏(タイトル画像中央)
- 森・濱田松本法律事務所 弁護士 佐藤典仁氏(タイトル画像右)
- 株式会社スマートドライブ 代表取締役社長 北川烈氏(タイトル画像左)
※以下、野辺氏、佐藤氏、北川氏
テーマ1 30-40年先のモビリティ 人々の移動はどのように進化しているのか?
野辺氏は、30~40年前の鉄道における切符購入の変化から、人は少しでも「楽な」ソリューションが与えられれば、一気にその方向へ進む現象が発生すると述べた。
モビリティの進化を振り返る -2015年まで
車とICTの関係を先ほどの鉄道の変化をなぞりながら考えると、鉄道においてSuicaによる鉄道利用が可能となった段階で、利用者個人の判別が可能となり、その移動が把握できるようになる。その結果、個人の動きよりも、全体として「どういった人の流れがあるのか」を見極めることが可能になるということだ。これは、車の場合、データセンターに移動に関するデータを送ることで、全体としてどういう移動が行われているのかという状況が把握できるということだ。これからは、そういったデータ連携を当たり前とした考え方が進んでいく世界になっていくのだ。
歴史を振り返ると、1907年にT型フォードによる自動車の大量生産が始まり、1970年頃まで続いた。そして、1970年には半導体がECU(Electronic Control Unit)に搭載されて、自動車の世界に入ってきた。2000年に近づくと、コネクテッド・ビークルの登場により、状況は大きく変わってくる。

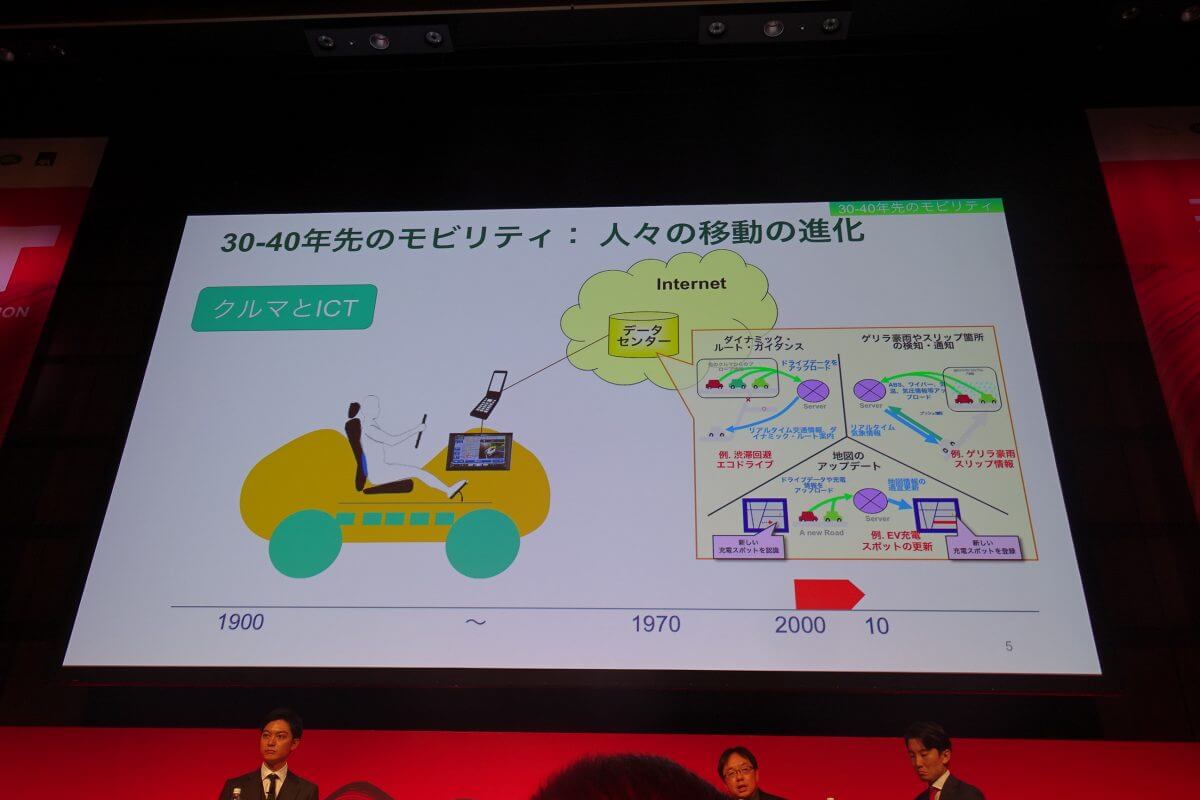
2000年当時、ナビゲーション・システムが日本で浸透したおり、携帯電話(ガラケー)を利用したデータ通信を行うことが当たり前となっていた。そこでナビゲーション・システムとガラケーを繋げることにより、データセンターに対して様々なデータをアップロードすることができるようになったのだ。その結果、クルマの位置情報を分析することで渋滞情報がわかり、激しいワイパーの動きでゲリラ豪雨の発生しているエリアがわかるようになった。
これらの情報を、ナビゲーション・システムに、地図の属性情報として戻すことで、ナビゲーション・システムは、渋滞やゲリラ豪雨を避けるような経路を再計算し、回避することも可能となった。
もう一つ重要なのは、1990年の段階で、ECUが人間の運転技術の不足分を補完するようになってきたことだ。
例えば、ABSが導入されて、スリップした場合、人間はブレーキを踏み続けてしまうが、本当はブレーキを踏み続けることは良くない。そこで、メカニカルにブレーキを解除・制御するようにし、スリップ時でも安定した走行を行うことができるようになったのが、1990年頃だ。
さらにもう一つ、大きな変化が2010年頃から発生した。それは、スマートフォンの世界的な普及だ。それまでは、ガラケーのみが車とサーバーを繋げていたが、2015年にはiPhoneとAndroid端末合わせて年間10億台が生産された、直近ではその数は17億台にも上る。
この変化と端末をターゲットに、クラウド上で多くのサービスが提供されるようになった。それをスマホにダウンロードしてナビゲーションに移すことで、最新の情報をドライバーに提供可能となったのが、2010年から15年にかけての変化である。
そして、2010年頃には、一台のクルマにこのECUが100個程度搭載されるようになった。ECUが把握した走行状態の情報は、スマホによりデータセンターに送ることもできるようになった。こうした技術が、2015年頃にかけて、さらに急激に進化を遂げたのだ。
モビリティの進化を振り返る -2015~2020年
それで、現在2015年と2020年の間で、クルマにはカメラやレーダーが搭載されて、白線を認識し、その間をレーンキープして走り続ける、あるいは前走車との車間距離を維持する、障害物があれば停止するといったことが行われるようになった。
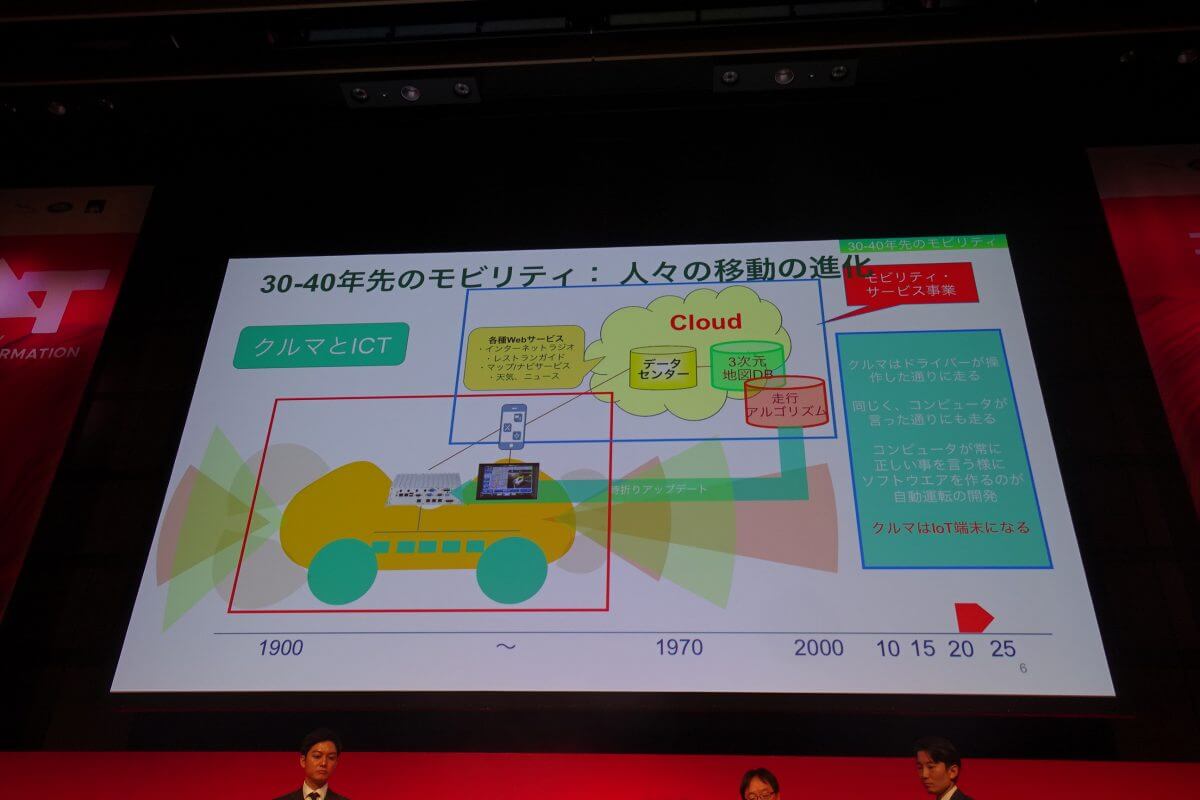
やがて、車が環境を見るようになり、そのデータを同じくスマホを経由してデータセンターに送ることで、地図上でここはこういう状況であるということが認識できるようになった。そして、多数のクルマがその情報をアップロードするようになる。それによって、どの道路がどういった状況になっているという情報を全ての車にフィードバック出来るようになった。
もう一つはECUのデータについてだ。これらのデータをデータセンターへ送り、分析することによって、場所によって最適な走り方が認識できるようになった。さらに、ディープラーニング利用することで、クラウド上で学習するということが出来るようになった。
こういった結果が、世界中に拡大されていき、世界中で、「ここはこう走ればよい」ということがわかるようになれば、人間の代わりにコンピューターが運転することができるようになる。もちろん、全ての車がこうなるわけではないが、2020年以降 一部の車からこういう形になってくるということが明確になってきた。
その上で、この先完全自動運転の車が登場してきた時、MaaSに繋がっていくのだが、これがモビリティの世界を変えていくことになる。
MaaSの本質は何かというと、「乗りたい人と乗せたい人をマッチメイキング 、即ち出会わせているところ」にあるのだ。
乗りたい人=ユーザーのスマホと、乗せたい人=ドライバーのスマホをデータセンターで結び付け、誰を乗せているということをデータセンターで管理する。
その上で、誰と誰を結び付けて、誰がユーザーで誰がドライバーかということを、上手くデータベースを使って最適化させている。さらには、タクシーといったフリート等を含めてをマネージメントする、つまりフリートマネジメントシステム(FMS)だ。
SNSとFMSを繋げたものが、ある意味ではUberであり、初期段階のMaaSであると言えるだろう。このドライバーが自動運転に置き換われば、自動運転のまま乗りたい人に繋がっていく。
データセンターは他に鉄道やバス、あるいは電動自転車、スクーターといったものが今どこにあるかということを把握しており、さらには、自動運転カーは、今後EVになるので、EVは今後の再生可能エネルギーの世界における蓄電池ともなる。
このモビリティサービスを提供するデータセンターは、クルマの動きと人の動き、モノの動き、エネルギーの動きを把握するようになる。それによって、今後の都市がどうあるべきかということで、都市計画にも結び付いていくというのが、非常に重要なポイントとなる。
モビリティの進化とこれから -2020年以降
さらに、このような動きが2050年時点まで今後どれだけ加速するかについては、コンピューターの発達スピードが非常に重要である。
それを具体的に予測しているのが、「テクノロジー・シンギュラリティ」だ。
2045年には100億人と想定する全世界の脳を足したのと同じだけの計算能力を持つコンピューターが、1,000ドルで実現するという予想がこのテクノロジー・シンギュラリティ・ポイントというものなのだ。
その過程で1,000ドルのコンピューターは計算能力では、既にネズミの脳を超えている。さらに、人間の脳を超えるのは、2023年頃に超えると見込まれている。このように、コンピューターの性能は、今後急激に伸びていくことが予想されているのだ。
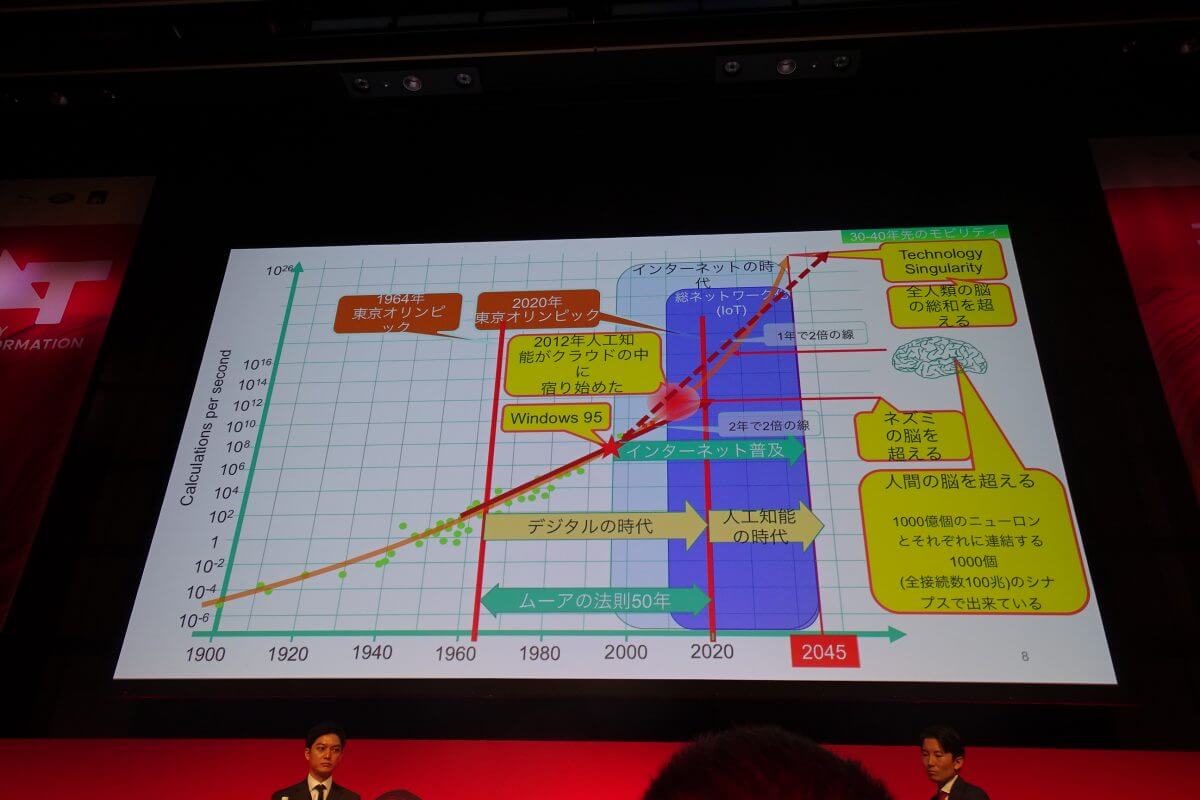
ちょうど前回の東京オリンピックと今度の東京オリンピックの間で、コンピューターの計算能力が2年で2倍に伸びている。
ところが、 このテクノロジー・シンギュラリティという絵を描いているカーツワイルによると、それ以上に伸びる可能性を示唆している。
しかし、コンピューターの半導体には、今後物理限界と言って、計算能力が伸びなくなる限界点があるが、テクノロジー・シンギュラリティは伸びている。これは、なぜかというと1年で2倍の線、この交点を見ると、1995年にぶつかるところに注目してほしい。
1995年に何があったかというとWidows95の発売で、ここからパソコンがインターネットに一気に繋がり始める。当然ながら、携帯はインターネットに繋がっているので、全ての端末がインターネットに繋がるといったのだ。
さらに言えば、今後1,000ドルのパソコンで人間の脳の計算能力を超えると言うが、パソコンと携帯が繋がった先のデータセンターの中のサーバーには、既に人間の脳の計算能力を超えたものが存在している。
そのため、2012年あたりからディープラーニングが生まれている。
この先、パソコンにおける能力進化が進み、2045年よりは少し遅れるかもしれないが、2050年くらいには全ての人間の脳を足し算したくらいの計算を1,000ドルくらいのパソコンで出来てしまうだろう。
その時、それがパソコンの形をしているのか、スマホの形をしているのかはわからないが、非常に小さい端末になり、ディスプレイはARを使って空間中に表示するとか、あるいは視線に依存せずに、空間中のどこかに表示するようなことがヒューマンインタフェースになるだろう。いずれにしても、相当な演算能力をみんなが持つということになっていく。
そういったものを持って歩いている人が、行きたい場所を端末へ伝えるとデータセンター上にタクシーの位置だけではなく、バスや鉄道、自転車の位置だけでなく地図もアップデートされている状態なので、何らかの最適なルートがアウトプットされるようになる。
そのルートは、例えばA地点からB地点まで行くのに、最も早く、安く、快適に移動できるものであったり、それは、今挙げた要素全てを満たすものでなくても、一部的にでも実現できるようになってくる。
中国の場合、人口が多いのでこの計算をするには量子コンピューター程度の計算能力が必要になってくるだろう。また、ある人が借りていた車を、他の人に簡単に権利を委譲していくことに対しては、ブロックチェーン技術が非常に重要になってくる。
さらには、現在のスマホみたいなものが核になって、データを集め、またスマホを使って結果を見る。さらに言えば、スマホがクルマを運転するようになる未来がやってくるのではないだろうか。実際はクラウドが計算しているが、スマホを一緒に持っていけば、「今日はどこにこの人行くんだ」と、スケジュール情報から自動的にそこに連れて行ってくれる、というのが2050年、40年後の社会に起こり得るだろう。
スマホがクルマを運転するくらいの気持ちで、ぜひ今後の話を聞いていただきたい。
野辺氏の自動運転技術に関する話をうけて、佐藤氏はより直近で議論が交わされている法的論点について解説した。
自動運転を実現するにあたっては、大きく3つ検討しなければならないと言われている。
自動運転にむけて検討すべき法的論点とは
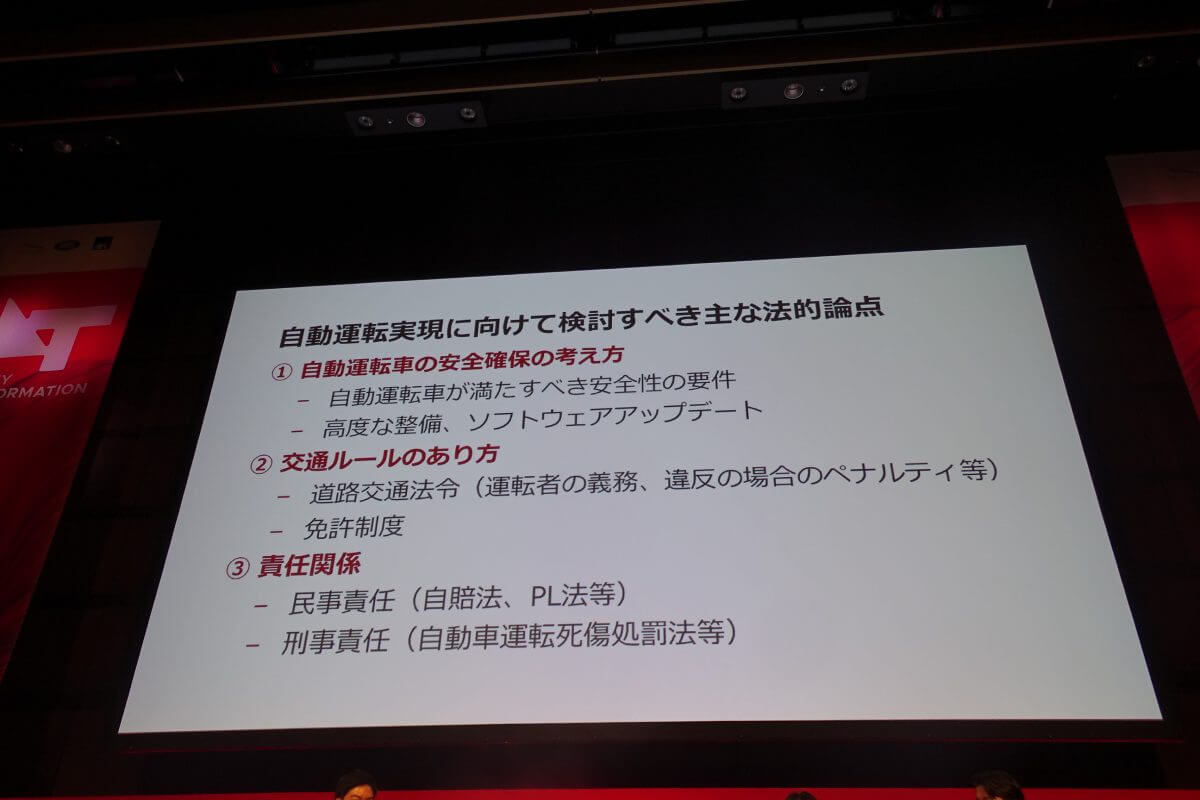
- 1点目、自動運転においてどのようにして安全確保をしていくか、自動運転車の満たすべき安全性とは何か
- 2点目、交通ルールの在り方について。自動運転が現実となった際、誰がどのようにして安全を確保し、そして運転者の義務というのがどう変わっていくのか
- 3点目、免許制度だ。そもそも免許制度が要らなくなるのではないか、あとタクシー、バスだと二種免許というのがありますけど、そういったカテゴリー自体も不要になるんじゃないか
特に、3点目は責任関係という部分で、ここで指す責任とは「民事責任」、「刑事責任」のことを指す。運転者がいなくなる、また義務の内容が変わっていく中で、どういった責任を負っていくのかというのが大きなポイントになるが、具体的に3つの内容を佐藤氏は説明した。
自動運転における安全性
まず1点目の安全確保という点、日本では国交省が自動車の安全等を所管しており、そのガイドラインを2018年に公表している。その中では、具体的な安全に関する細かい基準はまだ出来ていない。
しかし、一定のODD(Operational Design Domain:運行設計領域)と呼ばれる自動運転車が安全に運行できるとされる運行設計領域の中においては、「自動運転システムが引き起こす人身事故であって合意的に予見される防止可能な事故が生じないこと、そういった安全性を満たす自動運転車を作っていく」という指針を出したのが昨年だ。
その後、道路運送車両法という自動車の安全に関わる法律を改正し、これをもって自動運転車を日本に導入できるという状態となった。
今後の課題は、現在の自動運転の技術はレベル3、4という状態でかつ、基準の細則も決まっていない。今後細則を決めていくうえで、誰がどのようにして、安全性を検証出来ているかなどといった点が課題になっていくのだろうと考えられている。
自動運転における交通ルール
2点目が交通ルールだ。道交法が先般改正されレベル3までの対応済みとなっている。このレベル3というのは、ドライバーは車中で車から呼ばれた時は対応する、ただ呼ばれるまでは車の中で映画などを見ていてもいいという状態だ。そういった状態で運転者における義務が法改正で明示された。
それは、引き続き自動運転車を使って中に乗っている人というのも、道交法上の運転であるとみなされているため、乗っている人=ドライバーであり、道交法上の全ての条件を満たすため、理論上は周りを見ながら安全に運転しなければならないという義務もその人には残った状態になっているということだ。
ではどうやって自動運転を認めるのか、というのがこの法改正のポイントだが、ODDでは一定の条件下では画面の注視といった例外的、限定的な場合において、自動運転の機能の使用可能が示されたのがこの道交法の改正だ。
ただ、今後の課題として、例えば道交法違反が起きてしまった場合、もしくは自動運転中にスピード違反が起きた場合。そういった時に、誰がどうペナルティを負うかという部分は、過失の概念や、注意義務違反になるのだが、あくまで事案毎に考えていくというところしか示されていない。
場合によっては、中に座っているドライバーにも違反切符が切られるということも有り得る余地を残した改正になっている。このあたりがユーザーにとっても、メーカーにとっても、肝心な部分であるにもかかわらず、明示されていない。そのため、メーカーとしてはどこまで作り込めばユーザーの過失なしとなるのかあいまいな状態であるため、引き続き検討されるべきところだ。
現時点ではレベル3までの改正となるため、レベル4、5については継続して対応していく必要性があるというのがこの交通ルールのポイントだ。
運転免許についても、今回の改正では改正されなかった部分だ。将来、思い描いているような複数の自動運転車を使ってサービス、例えば新しいタクシー事業などを展開しようとしたときなど、運転免許は遠隔操作している人が持ち、全責任を負うのか?といった点などは明らかにできていない。
自動運転における責任関係
3点目、責任関係について。まず民事責任については、現行法の下では車の所有者が運行供用者責任という責任を負っている。
会場の皆さんも自賠責保険に入られていると思うが、その保険で発生者責任をカバーしているという法的建付けになっている。が、しかしこの所有者の責任というのは、引き続き自動運転の導入初期においては維持していくということは示されている。
次に、刑事責任についても同様だ。道交法の話と似ているが過失責任は維持していく、ということも示されている。
今後、例えば、所有者が民事責任を負い続けるのが正しいのか、所有者というのは車は持っているが、運転自体に積極的に関与するというのが薄くなっていく未来が見えてきている中で、所有者に責任を負わせ続けるのが妥当なのかという部分は詰めていく必要がある。
現行の法体系の下では、レンタカーを借りた人というのは、所有者と同じ運行供用者責任を負うとされているのだが、タクシーの乗客はあくまでも乗客のため、運行供用者責任は負わないと定められている。
野辺氏が先ほど触れた、未来を思い描いてもらえばと思うのだが、A地点からB地点まで行きたい時に、来たクルマがロボットタクシーか、それともレンタカーなのかという違いがあったとする。
その場合、レンタカーが来た際は、自分は責任を負うがタクシーだったら責任は負わないという違いが発生する。しかし、本当にこれが妥当なのかという指摘もある。そもそも所有者責任という考え方をどう維持していくのかも含め今後の議論ポイントだ。
また刑事責任も先ほどの道交法の話と同様に、ある程度ドライバーというのは運転のタスクから解放されて、そもそも過失の根拠となる注意義務が無くなるはずだが、ドライバーの責任はどうなっていくのか。また、メーカーや車を市場に投入した人たちが直ちに責任を負うのか?そしてその人たちの過失を問うのか?という点も、直ちに問うのは難しい。
過失を立証するのは非常に難しいため、刑事責任を誰も負わない世界がもしかしたら来てしまうかもしれない。そういった点については今後検討していく必要があると個人的には考えている。
日本と海外の相違点について
ここで、2名の話から北川氏より「日本と海外における相違点があるとすればどういった点か」という質問があった。
確かに、日本と海外が違うという点はかなりある。開発の視点からいくと、文化の違いというものを吸収しなければならないと野辺氏は述べた。
その1つの例として、人へ道案内の方法の違いがある。日本人は地図を描いて教えるのに対し、海外の人はほとんど紙にストリート名称を書く。
何故このようなことが起こっているかといえば、日本の住所は何丁目何番地のどこにあるということを示す点情報であるのに対し、海外、すなわち日本以外は全てストリートアドレスであるからだ。ストリート名を5つくらい覚えておけば、それを繋げることで目的地に到達できる。そのため、簡単に紙に書いて道案内が出来るというわけだ。
日本では、自分が今どこにいるか、というのを二次元の地図を用意し、正確に示して道路案内をする。もし、案内から逸れてしまった場合再計算し、以後、計算し直すというナビゲーションが非常に重要だった。
一方アメリカは、セーフティ・アンド・セキュリティという問題があって、人知れず雪の中でスタックしてしまい、ガソリンが無くなって、死亡するということがある。そういう時は緊急車両が迎えに行けるように、通信をする必要があったことで、ITが車に入り始めたという経緯がある。
こういった、文化やあるいは交通ルール、その国の環境に依存するという面がある。まさにコンピューターでも、ハードウェアでなくて、ソフトウェアでそのプログラミングをすることによって実現するわけだが、日本と海外の違いと考える際、今後、車は文化に依存した土地で、その土地の文化を吸収するというのをソフトウェアで行う必要がある。
しかし、このソフトウェアにおける開発能力が若干低いというと部分が明確に日本ではあるので、この辺りが海外と日本の大きな違いではではないか。
では、規制や法律の面での違いについては、どうだろうか。


佐藤氏は、「自動運転の法整備で日本は遅れているのではないか、といった論調をたまに新聞で見かけるが実は進んでいる」と法整備の現状について解説した。
法改正自体は2020年に向けて実施済みで、既にレベル3を走らせることが出来るというのは、実は世界に先駆けて取り組んでいる。
実証実験については、首都高、OEMが実証実験をおこなっていて、ドライバーが乗る形で実証実験を非常にフレキシブルに実施している一方で、海外ではまだ自由に実施できていない状態だ。
中国を例に出すと、自由に実施出来ているのではないかとイメージをもたれるかもしれないが、実は実証実験なども保守的に行われている。そのため、高速道路での実証実験も、関係者へ尋ねた時点では認められていないといった状態だった。そのため、日本ではこうしたことを行っていると言うと、先方から非常に驚かれたりする。
それを受け野辺氏より、アメリカでは、「こうやりたい」と要求する会社が 特にテックカンパニーから出てきているという事実がある。国内ではそういった動きが見えないため、若干遅れているように見える。しかし、「現実的な法規制は、アメリカの方が進んでいるが、意外に国内でも進んでいる」というのが事実だと思う、と述べた。
テーマ2 移動の進化に必要な視点や取り組みは?
さて、2つ目のテーマは移動が進化するということを踏まえ、実際にどのような取り組みが行われているか?という問いが北川氏からあった。法的、そして技術的な面での議論が交わされた。
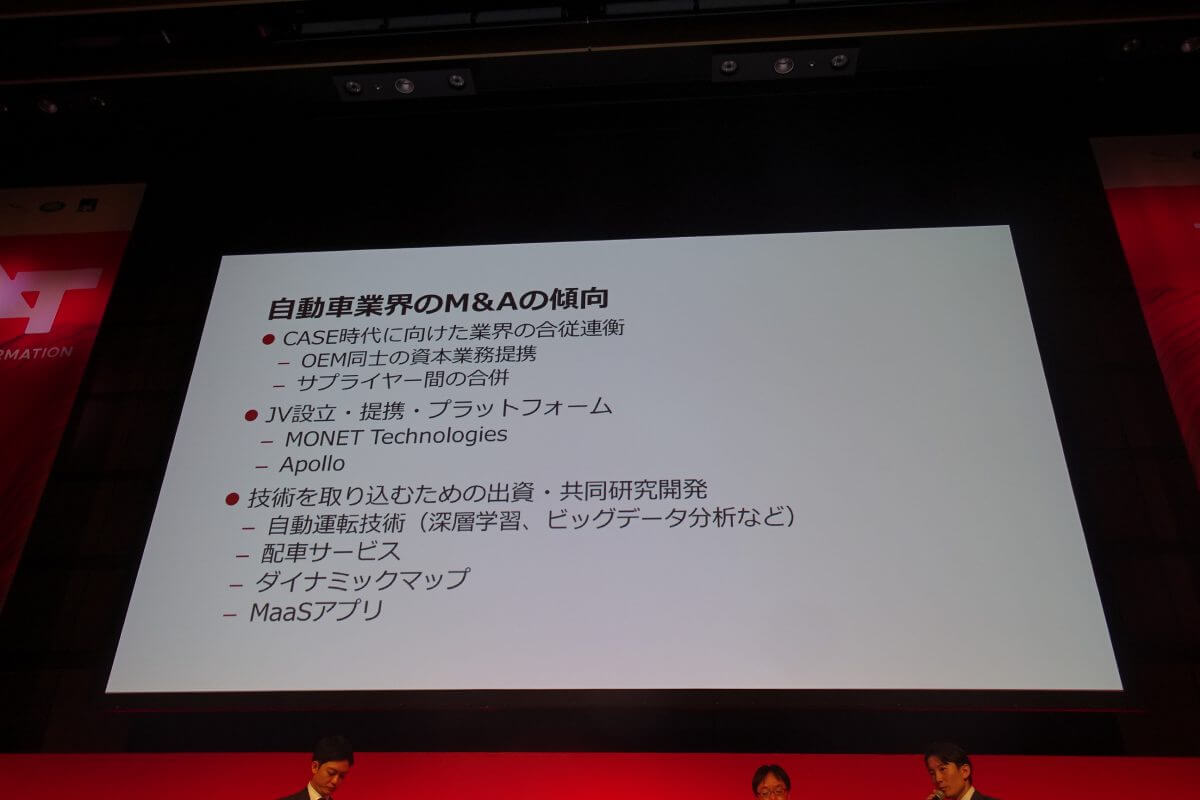
佐藤氏からは自動車業界におけるM&Aの傾向について話があった。
データからみれば、M&Aの数自体は増えていないが、「CASE」というワードに象徴されるように自動車業界も新たな取り組みを行っていかなければならないという動きは、既に出てきている。
OEM同士の商業提携にはじまり、サプライヤー同士の合併ならHondaの話題が最近とりあげられ、JVという観点ならMONET、ソフトウェア観点でいえばApolloなどもあげられる。また、自動運転や技術の観点ならば、Waymo、TOYOTAのe-Paletteに搭載するソフトウェアを提供するTier4の資金調達などがあった。また、ダイムラーが出資する地図サービスのHERE、MaaSアプリならフィンランドのWhim、また国内外の配車サービスしかり、業界の垣根を超えた出資が活発に行われている。
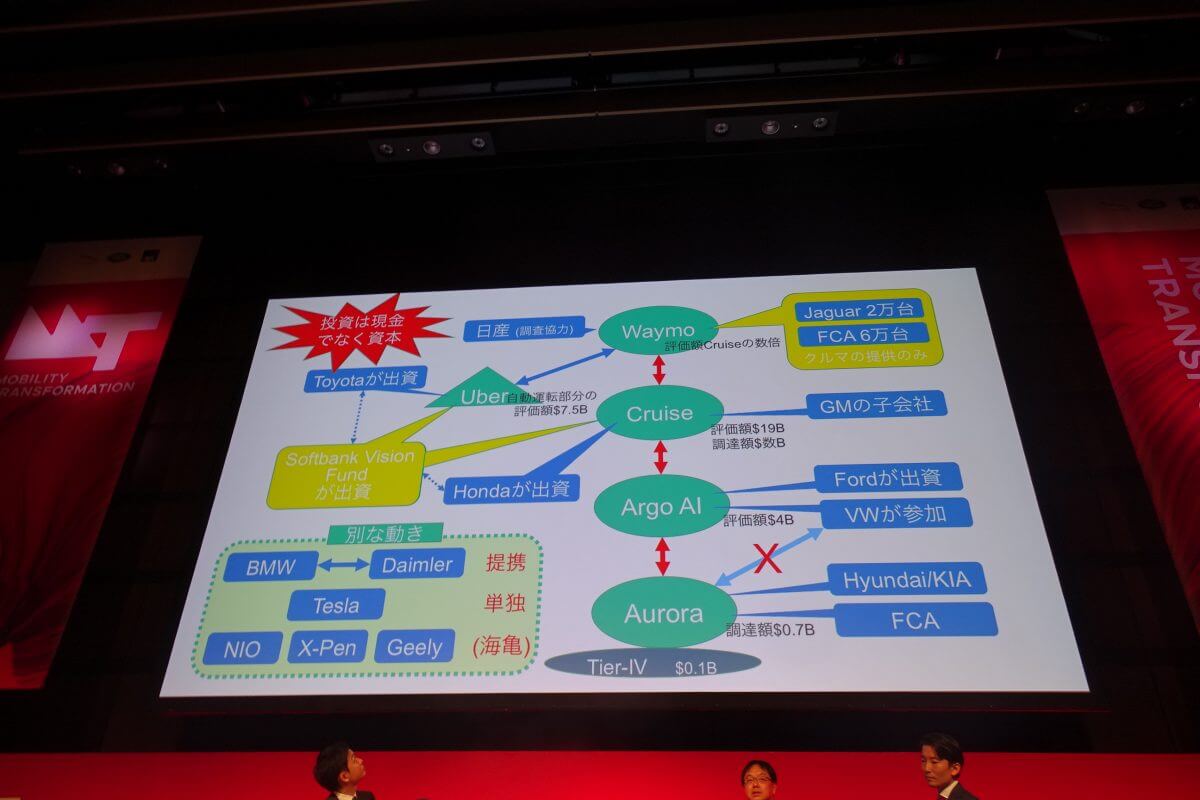
さらに野辺氏からも、投資的な面と技術的な面からの解説があった。
自動車産業全体では100兆円の売り上げ対し、利益率がおおよそ10%。自動運転やEVの開発には30兆円必要だといわれているので、3年分の利益分が必要となってくる。そのため個社で、開発を実現することは難しく、共同で出資を行うということになる。この図では、どのプレイヤーがどんなコンテンツをつくっているかということを示しているとのことだ。
最後に北川氏より、移動の進化に必要な取り組み、お二人が考える進化はどういったものか?という問いかけがあった。
自動運転という観点で法改正は進んでいるが、電動キックボードや無人のデリバリーなど、道交法のカテゴリーにはうまくはまらないものが現れたとき、現在はあまり合理的でない規制が残っている。そこを今後変えていくことで、思い描く未来に近づくことができるのではないかと佐藤氏は締めくくった。
また野辺氏からは、自動運転の安全性に対してコメントがあった。事故が起きるのは、他の車や人がイレギュラーな動きをするからで、例えば、周りの人間や車が交通ルールを確実に守ってもらい、そのために法律を厳格にしてもらえばいいのかもしれない。しかし、法律を厳格にしすぎるとおおよそうまくいかないことが多い。むしろ、逆効果も往々にして発生することがある。今後は、安全なルールを自動運転車側、一般的な車で探っていく場面と必要性があるだろうと締めくくった。