
日本の農業は長期にわたる就農人口の減少や高齢化等による人手不足が続いている。また、昨今の新型コロナウイルス感染拡大の影響により、外国人技能実習生が減少する等、農業現場の労働力減少に拍車がかかっている。
このような状況において、日本の農業を維持、発展させるためには、農家当たりの耕作面積地拡大等につながる生産性向上が求められるが、農家自身の努力だけで実現するには限界がある。そのため、ロボット農機等を活用して、農作業を可能な限り自動化することにより、直面する人手不足を解消することが期待されている。
国立大学法人北海道大学(以下、北大)、岩見沢市、日本電信電話株式会社(以下、NTT)、東日本電信電話株式会社(以下、NTT東日本)、株式会社NTTドコモは、2019年6月28日に産官学連携協定を締結し、農業ロボット技術と情報通信技術の活用によるスマート農業、サステイナブルなスマートアグリシティの実現に向けた研究、技術開発等を進めてきた。
今回、ロボット農業技術に、5Gと複数ネットワーク最適活用技術や測位技術等を用いて、農機の完全自動走行に向け、農機の広域自動走行とその遠隔監視制御を実現した。
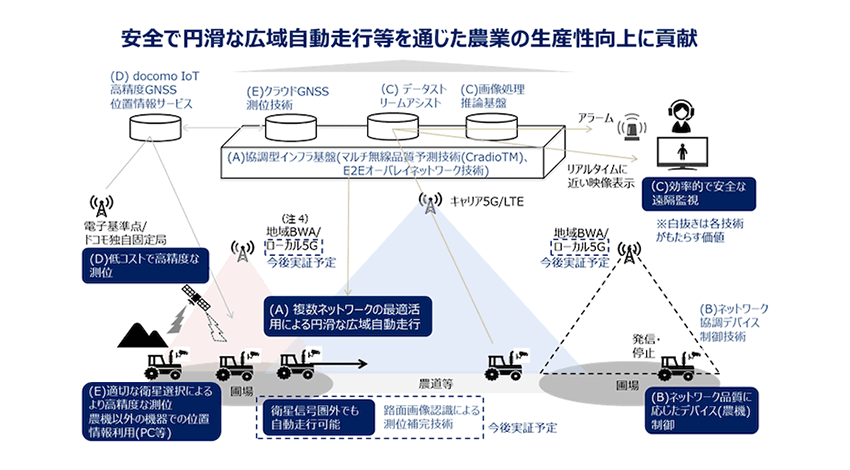
今回実証した技術は以下の5つ。
- 複数ネットワークの最適活用による円滑な広域自動走行
協調型インフラ基盤技術を用いて、複数のネットワークを跨って農機が自動走行する中で、通信品質の変動をAIが予測して通信品質が劣化する前に適切なネットワークに自動で切り替えることで、遠隔監視を中断させることの無い、安定的な自動走行を実現したという。 - ネットワーク品質に応じたデバイス制御
ネットワーク協調デバイス制御技術を用いて、ネットワークの品質変化に応じた農機の制御指示を実現し、監視映像が伝送できないレベルにネットワーク品質が劣化した際に、自動でトラクタを安全に停止させるなど、その有効性を確認したという。 - 効率的で安全な円滑監視
監視拠点で映像をパケットレベルで低遅延に複製することでネットワーク負荷を低減しながら、遠隔監視と画像解析などの複数の用途でのリアルタイム映像の同時利用を可能とするデータストリームアシスト技術を使用している。また、複数の映像ストリームを効率的に処理するストリームマージ機能やCPUやGPUなど様々なリソースを最適化する推論処理基盤技術により、処理を効率化しているとした。 - 低コストで高精度な測位
農家による固定局の設置が不要となる、「docomo IoT高精度GNSS位置情報サービス」を用いた農機自動走行の実証を行い、有効性を確認したという。 - 適切な衛星選択による高精度測位
農機に搭載した受信機で受信されたGNSS信号と固定局からの位置補正情報を使用して、クラウド上で測位演算処理を行い、リアルタイムの測位結果を農機の自動走行の制御に使用することで、その有効性を確認したという。

大学卒業後、メーカーに勤務。生産技術職として新規ラインの立ち上げや、工場内のカイゼン業務に携わる。2019年7月に入社し、製造業を中心としたIoTの可能性について探求中。

















