

これまでのロボットコントローラーは、ロボットメーカーの機能や環境に合わせて個別の設計や開発が必要だった。その一方で、生産の現場では様々な産業機器やロボットが存在し、統合的に制御しようとしても、簡単ではなかった。
しかし、生産の現場において、一台のIPCの中ですべての産業機械やロボットの制御プログラムを書きさえすれば、すべてが統合的に制御できるとしたら、さらにロボットをもっと高度に、複雑に制御できたら、どれほどよいだろうか。
そんなテーマに、デンソーウェーブとベッコフオートメーションが取り組み、製品化に結び付けた。
統合制御の仕組み
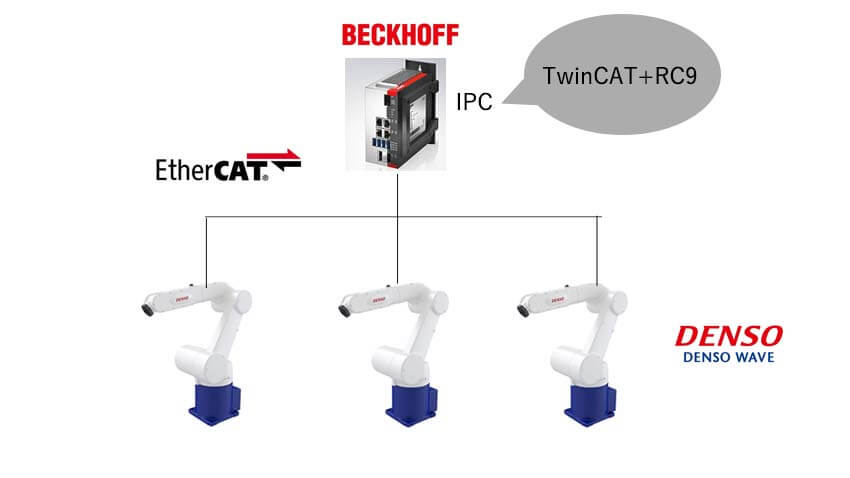
まず、PC制御が専業となるベッコフオートメーションの製品である「TwinCAT」と呼ばれるリアルタイムOSを搭載したIPCを準備する。IPCには、ロボットコントローラー「RC9」搭載されていて、高速通信を実現する「EtherCAT」と呼ばれるプロトコルを通じて、デンソーウェーブのロボットアームを制御するのだ。
こうやって、生産現場において、複数のロボットや産業機械の統合制御が実現される。(下図)
スタートは、2シリーズのロボットアームから
もともと、デンソーウェーブはロボットの活用場面が増えている現状に対して、オープンアーキテクチャーを採用することで、様々なニーズに対応してきた。
しかし、リアルタイム性の確保には課題があり、PLCや複数のロボットの統合制御は容易ではなかったのだという。
そこで、このRC9を、「VMシリーズ」「VLシリーズ」から採用、今後の製品にも順次対応していくということだ。
RC9を使った統合制御は、2019国際ロボット展で見ることができる
RC9は、12/18からビッグサイトで開催される、「2019国際ロボット展」のデンソーブースに出展され、統合制御された生産ラインを見ることができる。
また、12/18 14:30 同ブースにて、コンセプトの解説や展示デモの説明もされるということだ。

IoTNEWS代表
1973年生まれ。株式会社アールジーン代表取締役。
フジテレビ Live News α コメンテーター。J-WAVE TOKYO MORNING RADIO 記事解説。など。
大阪大学でニューロコンピューティングを学び、アクセンチュアなどのグローバルコンサルティングファームより現職。
著書に、「2時間でわかる図解IoTビジネス入門(あさ出版)」「顧客ともっとつながる(日経BP)」、YouTubeチャンネルに「小泉耕二の未来大学」がある。

















