

建築現場は、工事の進捗に応じて作業場所や周辺状況が刻々と変化する。また、屋内での作業が多く、GNSS(全球測位衛星システム)による位置計測ができないため、建築現場内におけるロボットの自律移動の実現には、開口部、資機材、高所作業車などの移動物や障害物、立入禁止エリア、さらには作業員を安全かつ確実に回避できるようにしなければならず、実用化には多くの技術的課題があった。
鹿島建設株式会社(以下、鹿島)と株式会社Preferred Networks(以下、PFN)では、これらの課題解決に取り組む共同研究を2018年に開始し、現場の画像、3Dデータ、図面情報の収集および深層学習、コストを含めた実用的なセンサ構成の検討、現場での試行実験を重ねてきた。
このほど両社は、建築現場で使用するロボットが現場内を自律移動するためのシステム「iNoh」を共同開発した。併せて、iNohを初搭載したAI清掃ロボット「raccoon」を開発、首都圏の現場に導入を開始した。iNohの詳しい機能は以下のとおり。
- マルチセンサによる自己位置推定および3次元空間マッピング(SLAM技術)
- 深層学習による周辺環境認識
- リアルタイムナビゲーション
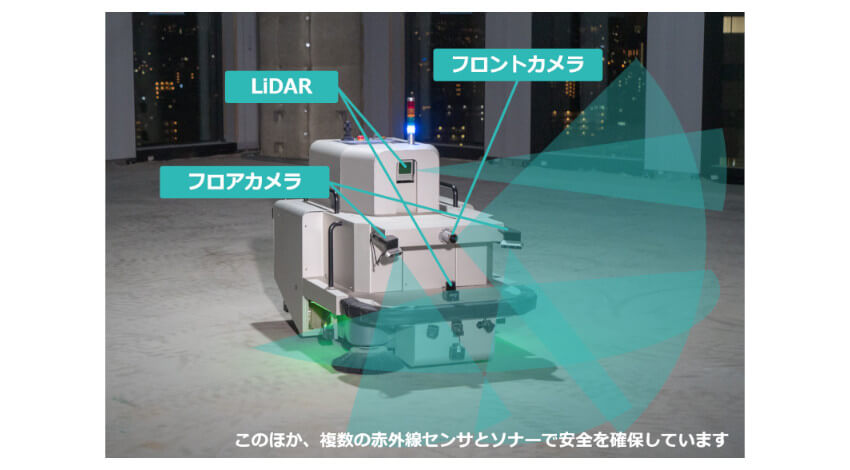
魚眼カメラ、LiDAR(レーザー照射による測距装置)、IMU(慣性計測装置)など複数のセンサを統合することで、変化の激しい非GNSS環境においても自己位置の正確な推定が可能となる。また、得られたデータから3次元空間をマッピングすることができる。
深層学習技術を用いて現場の膨大な画像データを学習することにより、障害物や高所作業車などの移動物、立入禁止エリア、作業員などを正確に、かつ安定して認識可能だ。
ロボットが自己位置や周辺環境を認識し、障害物を回避した作業ルートをリアルタイムに自動生成するため、作業範囲を限定するマーカー類の設置など人による事前設定が不要であり、現場納入後、即座に利用できる。
また、raccoonには以下の2つの清掃モードを搭載しており、本体の操作画面から最短3タッチの指示でコンクリート床面にあるゴミや粉塵を自律移動しながら清掃する。今回、raccoonを首都圏の複数現場に試験導入した結果、100分の連続稼働で約500㎡のエリアを清掃できるなど、iNohの実用性を確認することができた。
- おまかせ清掃モード
- 領域清掃モード
現場内の地図や作業員の指示がなくても、自ら清掃可能エリアを探索しながら自律清掃
清掃可能エリアの地図を自動作成後、連携する施工図面上から清掃領域の指定が可能

今後、raccoonを鹿島の建築現場に順次展開していくとのことだ。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















