

ハノーバーメッセ2021において、ベッコフオートメーションの発表内容を、日本代表の川野俊充氏にインタビューした。今回は、その内容をレポートする。
(聞き手:IoTNEWS代表 小泉耕二)
ベッコフの時代を表す導入事例とファクト
IoTNEWS 小泉耕二(以下、小泉): 今回ハノーバーメッセ2021では、どのような発表があったのでしょうか。
ベッコフオートメーション株式会社 代表取締役社長 川野俊充氏(以下、川野): まずは、当社のリアルタイム実行環境である「TwinCAT」と、産業用の高速通信ネットワークである「EtherCAT」の、ここ最近で導入されている印象的な事例について発表しました。
1つ目は、中国の風力発電への導入事例です。近年中国は風力発電の開発に力を入れており、ワット数で行くと世界最大の国です。その中国の風車の半数以上に当社のTwinCATとEtherCATが導入され、制御されています。
当社としては、SDGsに対して積極的な活動を行なっていく方針です。そうした中、再生可能エネルギーである風力発電市場に寄与できたことは嬉しく思っています。
2つ目は、アメリカズカップという世界最高峰の国際ヨットレースがあるのですが、今年優勝したEmirates Team New Zealandの船に、当社のTwinCATとEtherCATが導入されています。
風が来たときにフィンをどれくらいの角度にするかといったことや、曲がる時の最適な舵の角度などの制御に活用されています。
3つ目は、チリにあるグランドマゼランという巨大な天体望遠鏡に導入されています。天体望遠鏡は、多数の鏡をミクロ制度で制御し、位置合わせをして光を集束する必要があります。その際の重力補正や振動抑制、大気の揺れなどの補正の制御に使われています。

4つ目は、人工呼吸器への採用です。世界的に新型コロナウィルス対策において、人工呼吸器の需要が高まっています。
そこで、チェコのベンチャー企業が国家プロジェクトとして取り組み、開発から数ヶ月で製品化したものに、TwinCATとEtherCATが導入されています。さらにオーストラリアの人工呼吸器にも当社の製品が採用され、その後他国でも導入が進んでいるという状況です。
小泉: 様々な分野領域に導入されているのですね。
川野: そうですね。その他にも様々な導入事例があるのですが、現段階で発表できる代表的なものを紹介しました。
そして当社の最新の数字について発表しました。

全世界で従業員数は4,500人、技術者は2,000名程度在籍しています。
ドイツ国内には、22の拠点があります。国外の現地法人は39カ国まで増加し、75カ国以上の国で当社の製品が使われています。
昨年末までの売上高の実績は923ミリオンユーロで、一昨年と比べると2%増にとどまっていますが、コロナ禍ということを鑑みると大変感謝すべき成果だと考えています。2000年から20年間の年平均の成長率は14%になります。
2021年の四半期は、多くの受注をいただき、前年度比で30%増の注文、15%の売り上げ増だったのですが、この数字をどのように見るかは慎重になるべきだと考えています。
1つの見方としては、新型コロナウィルスで今まで止まっていたプロジェクトがまとめて動き出したという観点があります。もう1つはコロナが長期化しているため、サプライチェーンの棄損が続き、パニックオーダー的に在庫を確保しようとする流れがあったという見方です。その他にも様々な解釈ができると思うのですが、少なくとも今後、受注がどのように推移していくかは注意深く見ていく必要があると思っています。
小泉: この受注の増加や売り上げ増というのは、産業領域としては製造業が多いのでしょうか。
川野: そうですね。他にも舞台やエンターテイメント、テーマパークなど幅広い分野からの受注もありますが、医療や食品などを含めると、製造業の割合が多いと言えます。
ニーズに応えるソフト・ハードのアップデート
川野: 次に最近のPCコントローラーの代表的なラインナップ、「C601x-0020」「C602-x0000」「C603x-0070」をご紹介しました。

「C601x-0020」は、超小型産業用PCです。「C603x-0070」は最新のIntel Core-iが搭載されており、8コア以上のコアのものが新しく登場しました。
「C602-x0000」は、この2つの製品の間を埋めるような製品です。Intel Core-i Uという低電圧タイプのプロセッサを搭載しています。単位処理当たりの消費電力が非常に小さいので、エネルギー効率がよく、環境に優しいという面も兼ね備えています。
そして、防水・防塵・体幹矯正IP 67タイプである「C7015」もご紹介しました。これは先ほどTwinCATとEtherCATの導入事例の際に出てきた船の上などでも、防水・防塵仕様のため、直接置くことができます。

また、ベッコフはもともとケーブルやメカなどを、なるべく減らしていこうという方針のもと製品開発を行っています。この「C7015」では、その意味でも弊社として象徴的な製品です。制御盤そのものを不要とできる可能性があるためです。例えばこれを産業ロボットの足元に直接取り付けても問題ありません。
さらにこの「C7015」は、ボックスI/Oを直接マウントして機能拡張することもできます。接続する際も信号と電力を両方供給できるEtherCAT Pのケーブルを使うので、通常2本のケーブルが必要なのですが、1本で繋ぐことが可能です。
続いてご紹介したのが、AMDのRyzen CPUが搭載されている「CX 20×3」シリーズです。このAMDのRyzen CPUは、ゲーミングPCでも人気があるほどハイパフォーマンスなCPUです。

サイズはIntelのCPUが搭載されているCX 2000シリーズと同じで、外観も同じです。外観を見ただけでは中にIntelのCPUが入っているか、AMDのCPUが入っているか分かりません。外観が変わらないので、今までの制御盤に入れ替えてアップデートすることもできますし、価格性能比が非常に高いです。
また、「CX 20×3」シリーズは、後方互換性が非常に高く、TwinCAT 2にも対応しています。TwinCAT 2は25年前の製品ですが、それを最新のアーキテクチャで動作させることができるのは、AMDのCPUのおかげなのです。
次に、サーボターミナルの「ELM72xx」に大容量版が新しく加わりました。このサーボターミナルは幅12ミリのI/Oターミナルと敷き詰めて設置ができますので、このIO/サーボドライブ全体を単一のEtherCATセグメント内で制御できます。装置の小型化を実現するのに有効な製品です。

これまでは小さいが故に大容量モーターが回せなかったのですが、今回はメタルハウジングにして16Aまでの電流を出力できるようになりました。1000Wほどのモーターを動かせるようになったので、用途が広がります。
同じタイプで2チャンネルも用意しており、8Aのモーターを2軸まで回すことができます。出力するパワーは同じですが、2軸分に分けるのか、1軸で大容量にするのかを選択することができます。

また、先ほど「C7015」でもご紹介しましたが、「ELM72xx」でもケーブルにOCT(ワンケーブルテクノロジー)が採用されていて、動力とエンコーダ信号の2本必要だったケーブルが1本になっている点も1つの特長です。
続いて、TwinCATもアップデートが発表されています。機能は毎年増えているのですが、特徴的なアップデートをいくつかご紹介します。
1つ目は、FreeBSDに対応したという点です。もともとTwinCATは、ザ・ウィンドウズ・コントロール・オートメーション・テクノロジーの略であり、Windowsを使うメリットを最大限享受することにフォーカスしてきました。
しかし、Windows以外のオープンなOS、特にLinuxを使いたいというニーズも増えてきました。万が一不具合があった場合、OSに起因する不具合かどうかの原因究明が必須となるケースもあるからです。
そこで今回FreeBSDのオープンソースOSを使うことで、そうしたニーズに応えています。Windowsに比べると機能性はこれからの部分も多いものの、同じCPUであれば圧倒的に動作が軽いというメリットがあります。
2つ目は、PLC Profilerという機能が新たに追加されたという点です。これはPLCのプログラミングをする際に、性能の最適化を行う機能です。
例えば個別のファンクションブロックごとにそれらが何μsで実行されるのか、最大値、最小値、平均値などと共に、コマンド単位で表示されます。ですから、処理時間を切り詰めてサイクルタイムを追い込むときに役立ちます。他の開発環境にはあまりない機能なので、プログラムを書くエンジニアには開発生産性が高まると歓迎されるでしょう。
3つ目は、VisionとScopeが一体化したという点です。制御しているロボットの映像を、グラフの上にドロップ&ドラッグすると、ロボットの各軸を動かすモータの電流値とカメラからの映像が同期して見られるので、想定外の電流が流れた時に、ロボットが何をしていたかを映像で確認することができます。
この機能はトラブルシュートの際とても役に立ちます。例えばロボットが何かを落としたり、ぶつけたりした際に、電流値と映像を照らし合わせて確認しプログラムを修正する、というようなことが可能になります。制御、計測、画像処理を同じCPUで行うことが、TwinCATの開発環境のアップデートをするだけでできるようになります。
4つ目は、Cloud Engineeringの機能が追加された点です。これはブラウザ環境さえあれば、クラウド上にTwinCATの開発環境が構築できるというものです。
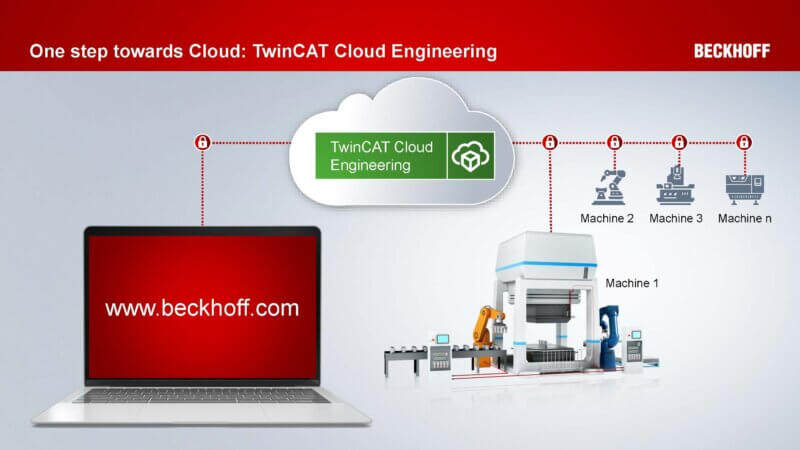
例えばPLCの基礎トレーニングをする際に、今までであれば機材の準備が必要でしたが、Cloud Engineeringを使えば、バーチャルマシーンを動かしながらトレーニングを行うことができます。
また、現場でのサービス対応をする際に、遠方に技術者がいる場合、今までであれば現地まで行かなければなりませんでした。しかしCloud Engineeringの機能により、クラウドに機械を繋いで、必要な開発環境をクラウドに構築すれば、遠隔からログインしてトラブルシュートをすることもできます。
次にリニアモーターを利用した搬送システム「XTS」をご紹介しました。製品自体は2011年に発表、2013年発売なので、10年ほどの実績があるロングセラーです。
その間ソフトウェアのアップデートは常に行っています。例えば、ソフトでフィードバック補正機能を追加し、ハードウェアはそのままでも位置決め精度を高めることも可能になりました。
方法としては、一度実際にXTSを動かしながら、挙動やメカのガタつき、可動子ごとの微妙に異なる質量や形状の差によって起こるバラつきを、精密にセンサーで測定していきます。そうしたバラつきをフィードフォワードすることで、精度が上がるという仕組みです。
ハードウェアに関しても、可動子のマグネットプレートにバリエーションが登場し、最大トルクが増えることでより重力のあるものを運ぶことができるようになりました。瞬間的な加速度も増え、さらなる高速動作が可能です。
また、ローラーを増やすことで、摩耗に強くなり、長寿命になった可動子も発表しており、ハードウェアも着々とアップデートをしています。
進化を続ける「空飛ぶ絨毯」XPlanar
川野: 続いてご紹介するのは、「空飛ぶ絨毯」ことXPlanarです。XTSでは、ガイドレールの制約がどうしても出てきてしまいますが、XPlanarはガイドレールもケーブルも何もありません。
[XPlanar紹介動画]
TwinCATをIPCにインストールし、IPCとタイルをEtherCAT Gで繋ぎ、タイルに直流電源を供給するだけでプレートが浮かびあがり、その状態のまま最大2m/秒で移動させることができます。
ムーバーのサイズは3種類で、それぞれ可搬重量が変わってきます。一番大きいもので4キロのものが運べます。
また、新しい機能として今後予定しているのが、複数の可動子を連動し、4キロ可搬のものを4枚連結すると、全体で12キロ持てるようになります。使用する可動子は増えますが既存のハードを変えることなく、ソフトウェアのアップデートだけで可搬重量を増やすことができます。
ムーバーのプログラミングも簡単で、どこの位置までムーバーが来るのかをある程度指示すれば、そこの到着地点に向けて、周りのムーバーの動きに応じて衝突をしないように自律的に移動します。
小泉: 以前はソフトウェアの設定が難しかった印象なのですが、操作性もアップデートされているのでしょうか。
川野: アップデートされています。以前はGコードという工作機械をプログラミングする言語でなければ使えず、慣れていない方にとってはハードルが高いものでした。今後はグラフィカルツールを使い、簡単に使いたいという人でもプログラミングを行えるようになります。
小泉: タイルとムーバーを動作させるために、PCのスペックはどの程度のものが必要なのでしょうか。
川野: システムの大きさによって必要なコントローラーのスペックが変わります。おおよその目安として、1つのコアで、1枚から2枚のムーバーの制御ができます。どのような動きにするのか、チューニングの程度など、要件に合わせてCPUや拡張機能を選んでいきます。
小泉: XPlanarの実際の利用シーンを教えてください。
川野: ドイツのPlasmatreatというプラズマ表面処理をする機械を作っているメーカーに導入されています。
[Plasmatreatのプラズマ表面処理に導入されているXPlanar]
XPlanarが導入されるまでは、ロボットでプラズマのノズルを動かして表面処理を行なっていたのですが、XPlanarを使うことで、ノズルを動かすロボットが必要なくなりました。ロボットはノズルを前に出すだけで、XPlanar側が動くことによって表面処理を行います。こうすることによりノズルを固定することができるので、プラズマの噴出量を均一に維持しやすいというメリットもあります。
また、半導体製造装置も想定されているアプリケーションの一つです。
XPlanarが半導体業界に向いている理由としては、クリーン仕様だということです。半導体の工場は、微粒子単位のゴミですら入れてはいけません。そうした環境の中で、全く摩擦部品・消耗部品がない搬送システムであるXPlanarは魅力的だと思います。
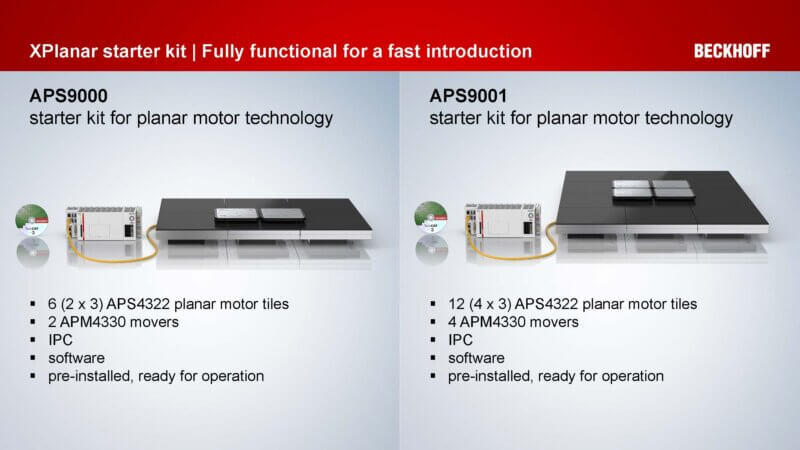
日本でもスターターキットの出荷を開始しました。ムーバー2枚とタイル6枚、ムーバー4枚とタイル12枚の、2タイプを出しています。このスターターキットは多くのの方に活用いただいています。業界で言うと、医療、半導体、自動車、エンターテイメントなど、幅広い分野で導入の検討が進められています。
検証を経て、あと1年ほどすれば展示会などの場で、実際の導入事例が発表されるのではと、楽しみにしています。
また、XPlanarの新機能も今回発表されました。回転することによる撹拌機能が、ソフトウェアのアップデートでできるようになりました。
[動画内11:30より攪拌機能の紹介がされている。]
この撹拌機能の紹介動画では、牛乳に食紅を入れて、キレイに撹拌されていく様子で表現していますが、例えば薬品を均一に撹拌する際などの利用シーンを想定しています。複数の液体を均等に攪拌するのは難しいのですが、XPlanarでは1回の誤差もなく毎回同じ回転数で攪拌するので、品質の向上・保証を図ることができます。
小泉: 様々な発表がありましたが、川野さんが特に注目すべきだと思う点は何でしょうか。
川野: XPlanarの撹拌機能です。ハードウェアのアップデートが全くなく、ソフトウェアのアップデートのみで新たな機能が追加できる点が大きなポイントです。
当初アイディアが発案された時点では、原理的に360度回すことはできませんでした。タイルは6軸の自由度があるのですが、1枚240m角のタイルの上では、磁石やコイルの配列が固定されているため、ある特定の角度までしか回せません。
そこで、4枚のタイルの交点の上を使い、ある特定の角度まで回すのを1つ目のタイルが行い、次の角度までを2つ目のタイルと、次々に回すことで、360度の回転を標準タイルのまま実現することができました。
小泉: この撹拌機能は、消費財メーカーなど化学的な研究開発をしているような企業でも興味を持ってもらえそうですね。本日は貴重なお話をありがとうございました。

現在、デジタルをビジネスに取り込むことで生まれる価値について研究中。IoTに関する様々な情報を取材し、皆様にお届けいたします。

















