

電力インフラの維持・保守を支える物流現場では、形状や重量が多岐にわたる資機材を出荷オーダーごとに正確にピッキングする必要があり、人手による重筋作業への依存が課題となっていた。
さらに、同一品目でもメーカによって梱包サイズが異なるため、出荷作業に専門知識が必要となり属人化を招いていたほか、社会インフラとして求められる高い出荷精度を維持するための厳重な検品作業が、現場の大きな負担となっていた。
こうした中、東電物流株式会社は、同社の中央支社において、株式会社Mujinが提供するフィジカルAIを活用したロボットケースピッキング自動化ソリューション「MujinRCP」を導入し、稼働を開始したと発表した。
同取り組みは、アームロボットとAGV(無人搬送車)を連携させ、多品種資機材のピッキングから検品までの一連の工程を自動化し、物流BCP(事業継続計画)を強化するものだ。
今回導入されたシステムは、大規模な自動倉庫などの固定設備に頼らず、汎用的なロボットとAGVを独自のシステムで統合制御することで、既存の倉庫環境に柔軟に自動化ラインを構築することができる。
具体的には、17台のAGVが資機材を順立てて供給し、アームロボットが3Dビジョンでサイズや形状の異なるケースを認識して自律的にパレタイズ(積み付け)を実行する。
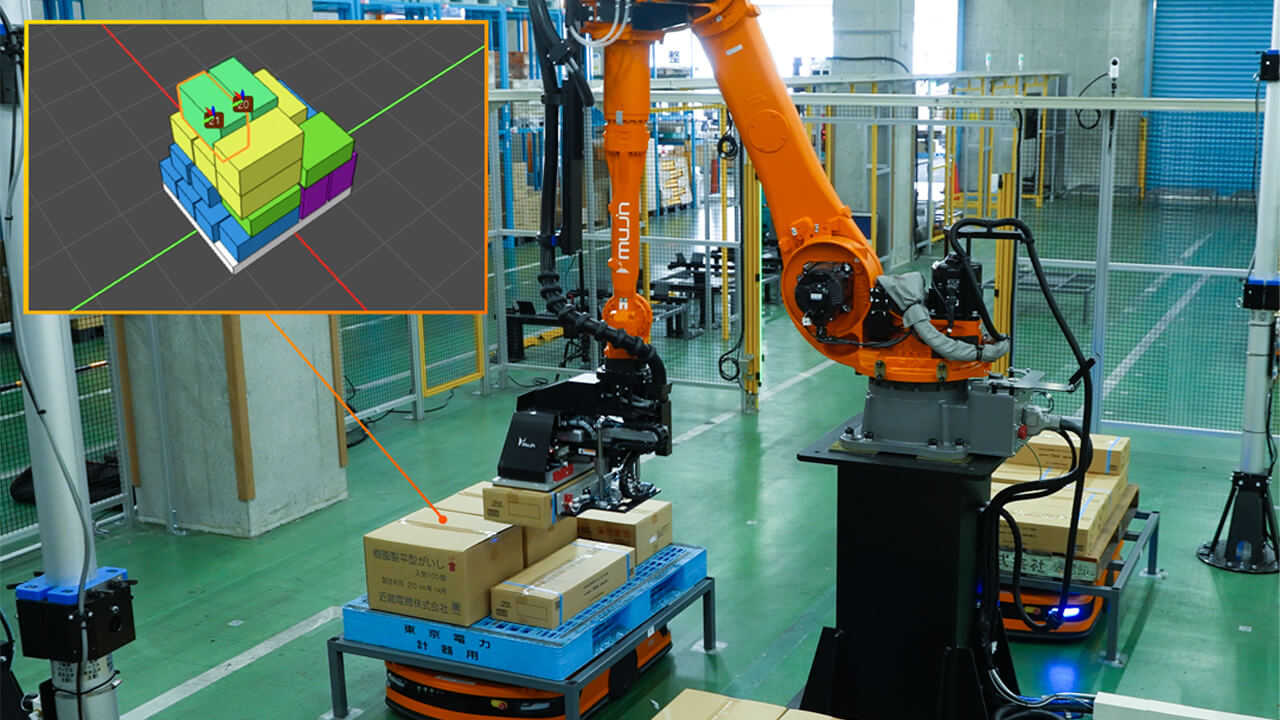
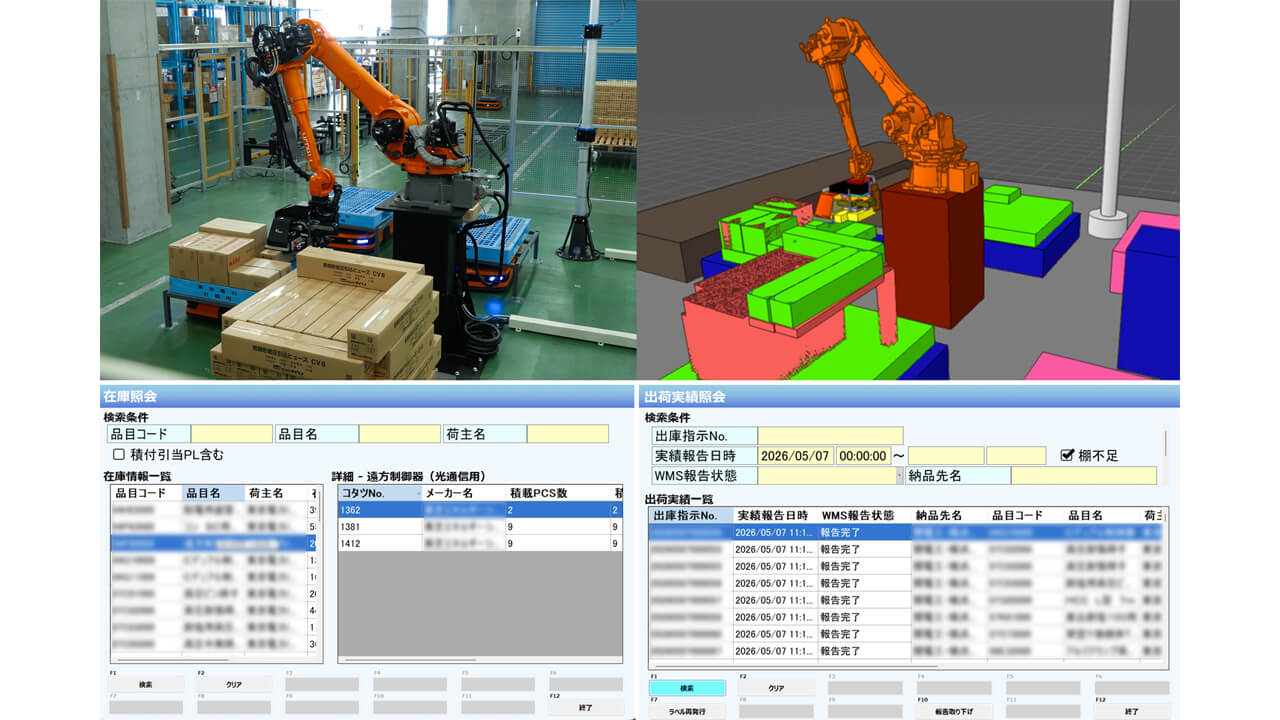
同時に、デジタルツイン上で設備の稼働状況や在庫情報を一元管理することで、従来は作業者の目視に依存していた確認工程をシステム上で管理する仕組みを構築した。
東電物流ではこのシステムの稼働により、中央支社における対象のケース品取扱量のうち90%の自動化を達成している。ピッキングにかかる作業人員を4人から1人へと大幅に削減したほか、システムによる管理への移行により対象工程の出荷検品作業を完全にゼロ化することに成功した。
また、人と搬送機器の作業エリアを分離したことで、現場の身体的負担や労災リスクの大幅な低減も実現しているとのことだ。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















