KDDI株式会社、株式会社ゼンリン、富士通株式会社は、2018年1月より、完全自動運転時代の「ダイナミックマップ」生成に必須技術となる大容量データの情報収集と、自動運転車へのマップ配信技術の実証実験を開始することに合意した。
自動運転車の安全な走行を実現するには、自車位置把握のための様々な道路構造物情報の正確な把握と、気象情報や事故・渋滞情報などの動的情報を取得して組み合わせる「ダイナミックマップ」の生成が必要となる。
この「ダイナミックマップ」には、自車の走行経路を認識しながら遠方の道路状況をリアルタイムにフィードバックするシステムの構築が欠かせない。
KDDI、ゼンリン、富士通は、「ダイナミックマップ」の生成に必要なデータ収集、データ分析・加工、データ配信技術の実証を行う。
また、実証実験においては4G LTEおよび、今後、次世代移動通信システム「5G」の活用を検討するとしている。
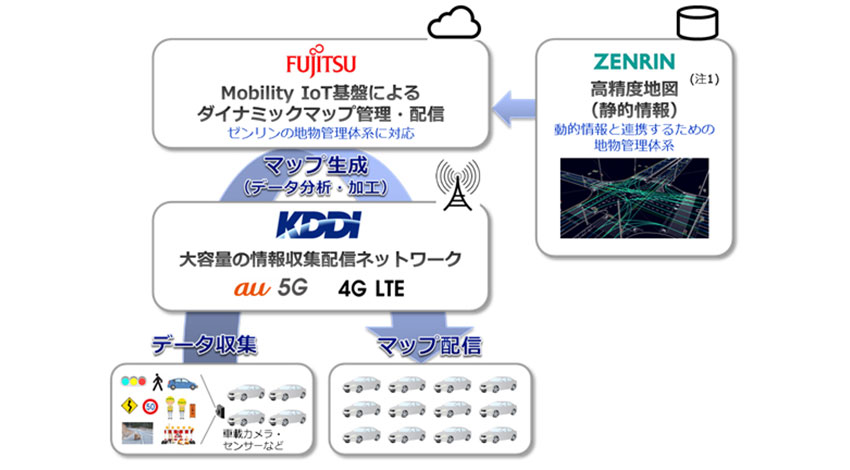
各社の役割は以下の通りだ。
- KDDI:
- 一定間隔で生成される車載カメラやセンサーのデータを確実かつ効率的にアップロードするための車載通信モジュールとネットワークの検証
- 逐次アップデートが必要な動的情報や地図データの差分情報などを必要とする、対象車輌に確実かつセキュアに配信する方式と最適なネットワークの検証
- ゼンリン:
- 動的情報との連携や逐次・差分更新を可能とする高精度地図データの提供および提供プラットフォーム「ZGM Auto」の検証
- 富士通:
- コネクテッドカーから得られるプローブデータなど大量の動的情報を収集し、高精度地図と動的情報の紐付けや車両へのリアルタイムデータ配信などを行うMobility IoT基盤のダイナミックマップ管理機能を提供
【関連リンク】
・ケイディーディーアイ(KDDI)
・ゼンリン(ZENRIN)
・富士通(FUJITSU)
・ダイナミックマップ(内閣府 WEBサイトより)
無料メルマガ会員に登録しませんか?
膨大な記事を効率よくチェック!
IoTNEWSは、毎日新着ニュースを公開しております。
週一回配信される、無料のメールマガジン会員になっていただくと、記事一覧やオリジナルコンテンツの情報が取得可能となります。
- AIに関する最新ニュース
- 実践を重要視する方に聞く、インタビュー記事
- 業務改革に必要なAI活用方などのノウハウ
など、多岐にわたるテーマが配信されております。
また、無料メルマガ会員になると、会員限定のコンテンツも読むことができます。
無料メールから、気になるテーマの記事だけをピックアップして読んでいただけます。
ぜひ、無料のメールマガジンを購読して、貴社の取り組みに役立ててください。
無料メルマガ会員登録
技術・科学系ライター。修士(応用化学)。石油メーカー勤務を経て、2017年よりライターとして活動。科学雑誌などにも寄稿している。
企業向けAI活用虎の巻

AIによって「優秀な人材」の定義が変化したことを、どうみるべきか —AI時代の人材採...

まだ、生成AIのチャットボットで消耗しているの? ー自律的に動くAIエージェントが働...

AI時代の「中間管理職クライシス」 —部下がAIに相談する時代、上司の価値はどこに残...

AIに仕事を頼む技術 —なぜ「営業資料を作って」と頼むと失敗するのか?

生成AIは、使い手の「言語化能力」を暴く、リトマス試験紙

AIに「ゴミ」を食わせるな ーAIエージェントが賢くなるデータ、バカになるデータ

AIで業務を自動化する方法とは ーなぜ、ChatGPTを配っても仕事は減らないのか?

なぜあなたの会社で、生成AIが活用されないのか?どこで活用すべきか?
生成AI活用ガイド

「自律型AI」が変えるSEO対策、Claude Codeを用いたSearch Con...

ロー・ノーコードツールDifyとn8n、あなたの業務に最適なのはどっち?両者の思想・...

AIでスカウト文を自動生成!プロフィールから「コピペ感ゼロ」の刺さる文案を自動生成す...

「CV増が売上に繋がらない」を解消!n8nでリードスコアリングと戦略立案を自動化する...

ノーコードで実現!人事データの不整合を自動抽出する給与監査システムの構築方法を解説

AIはどんな業務を効率化できる?13の検証事例から見えた生成AI導入方法と活用を徹底...

現代のOJTの新常識!?Difyで教育を「補完」する対話型AIメンターの構築方法を解...

Dify×GASで契約書レビューからデータ蓄積・管理までを行う生成AIシステムの構築...

顧客の声を生成AIで活用できる資産へ、ボタンひとつで分析するシステムの構築方法を解説

SNS運用をAIで内製化するには?カスタムAIとノーコードツールで効率化する方法を解...