
日本電気株式会社(以下、NEC)は、2018年に共創型体験スペース「NEC DX Factory」を開設した。IoTNEWSでは開設時の2018年に訪問し、体験の様子をレポートしている。
今回は、新たに追加されたデモンストレーションや、NEC DX Factoryに新たに併設されたローカル5Gラボなどを含む、新たな「NEC DX Factory」について取材を行った。
本稿では、NEC DX Factoryで見学することができる様々なソリューションを紹介する。実際にデモンストレーションをNEC DX Factoryで見学することで、ソリューションの特徴やユースケースについての理解を深めることができ、実際に工場への導入をイメージしやすくなると感じた。
NECマルチロボットコントローラ

多品種変量生産を実現するために、搬送ロボットであるAGVの導入を検討する場合、導入や運用に手間がかかることや生産状況や搬送状態に合わせた配車制御が難しいという課題がある。
NECマルチロボットコントローラは、多品種変量生産に対応するためのAGVの課題を解決するソリューションである。大きな特徴は3つある。
まず、最適経路生成だ。スタート地点とゴール地点を設定すると、その間のルートはアルゴリズムによって自動で生成される。最短ルートやコストが安いルートなど、目的に応じたルート設定が可能だ。1台ずつ経路を設定し、ティーチングするという手間がなくなるので、導入するためのハードルは低くなるだろう。
2つ目は、集中制御だ。マルチベンダーの複数のAGVを制御することができる。現在は、トピー工業と日本電産シンポのAGVと提携しており、2社のAGVを制御することができる。
3つ目は、外部システム連携だ。上位システム向けのAPIを提供しているので、MESやWMSなどの業務アプリケーションと連携することができる。
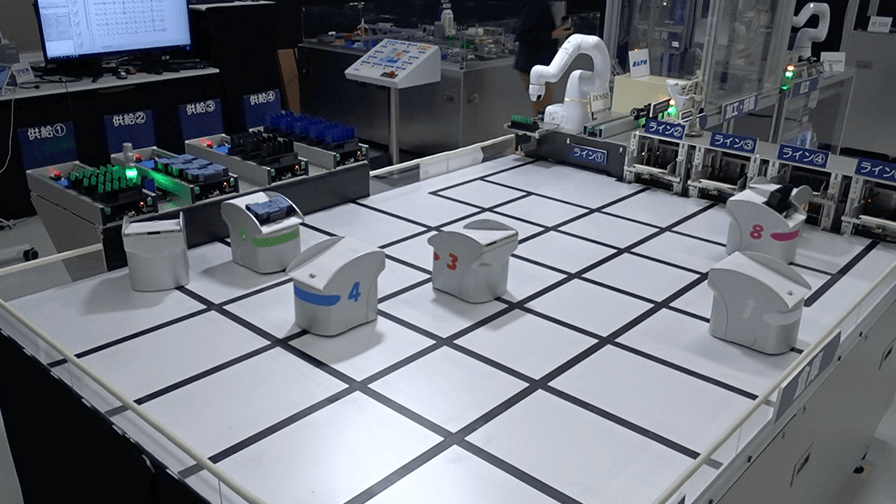
NECマルチロボットコントローラには管理画面があり、現場の状況を随時把握することができる。管理画面上では、AGVごとに色分けされ、それぞれのルートを自動生成し、どのAGVが今どこにいるのかを随時把握し、ゴールまで逐次無線で制御することができる。
管理画面上で、一時停止や走行禁止区域などの走行ルールを柔軟に設定することも可能だ。
次世代工場セキュリティ

セキュリティは、NEC DX Factoryを見学に来る企業にとって最大の関心があるという。
企業間連携などの影響で、データオーナーシップやセキュリティへの関心が高まっているが、国内外問わずOTの領域では様々な事件事故が起きている。
悪意のある攻撃だけでなく、従業員が設備にスマートフォンを接続してそこからウイルスに感染してしまうなど、悪意がない場合でも、生産ラインが止まってしまう事がある。
外部からも狙われているため、セキュリティ対策が非常に重要である。中には、OEMが攻撃の対象となるということもあるため、中小企業でも対策を迫られている。
NECが提案しているのは、リスク分析から運用定着までの支援だ。システムや設備を新規導入する場合はセキュリティ対策を考える機会が多いが、既存の資産や設備に対しても現状を見える化し、どのように対策するかを企画段階から検討していく必要がある。
工程設計シミュレータ

製造業を取り巻く環境は、不確実性の高まりが起きている。特に、需要変動が激しくなっており、機会を捉えて売上を上げるためには、生産ラインの立ち上げを迅速に行う必要がある。
生産ラインの迅速な立ち上げを実現するためには、いくつかの課題がある。
まず、生産ライン立ち上げ業務の中でも、生産準備を行う業務に課題がある。生産現場はアナログな業務が中心で負荷が非常に高いということと、設計完了まで生産準備に着手できないということが課題の原因である。特に設計は品質問題対応などで、納期を守れないことが起きがちだが、生産現場の場合、納期は顧客との契約のため必ず守らなければならない。結局生産現場で設計の遅れを吸収し納期を守るため、業務が忙しくなってしまう。
一方で、生産現場からの、生産性を高めた設計に変更してほしいという要望は、設計まで届かないという問題も存在している。こうしたフィードバックも漏れなく行っていくことが必要になる。
そのためには、設計と生産のデジタル連携を行う必要がある。効率的な製品開発を可能にするためには、生産準備を含めたサプライチェーンとエンジニアリングチェーンをBOPでつなぐことが重要だ。
NECでは、工程設計シミュレータというツールを用いて、設計と生産のデジタル連携を行おうとしている。
工程設計シミュレータは、生産ライン立ち上げ時に、デジタル上のシミュレーションで、ライン設計や改善を行い、最終的にベストな結果を現実のラインにフィードバックするためのツールである。BOPの情報や設備のパラメータのデータをシミュレータに盛り込むことで、シミュレーションの精度を高めていくことができる。
実際に、NECでは、新型コロナウイルス感染症の影響でホームルーターの需要が増えた際に、工程設計シミュレータを使用して、別製品を生産している工場でホームルーターを生産できないかの検討を行ったという。過去、NECは、タイでの水害や国内の天災で大きな影響が出たことがあり、その経験から、QMSやシステム、設備などを標準化しているため、生産移管や工場移管がスムーズにできるような基礎が出来ているという。
日本の製造業は、これまで工場ごとに生産性改善や個別の工夫を行い、同じ社内でも工場同士が競い合うことで生産性を高めてきたという背景がある。しかし、こうした背景とレジリエンスを意識した経営は相性が悪い。工程設計シミュレータで検討した結果を一度に全工場に広げたり、他工場で行った改善の横展開をしたりということが出来ないからだ。
標準化できる部分は標準化することで、新型コロナウイルス感染症のように国外の工場と連携が取れないなどといった有事の際に、工程設計シミュレータを活用し、生産できる場所で生産し、機会損失を防ぐということが可能になると感じた。
ビデオマネジメントシステム
工場内での動画の活用は、カメラを設置し撮影を行い、何か問題が起きたときには、映像を振り返り問題の確認を行うという方法が考えられる。しかし、24時間撮り続けている動画を、検索して特定の箇所を見るというのは、手間がかかって大変だ。
そこで、その検索を簡易的にするためのソリューションが、ビデオマネジメントシステムだ。
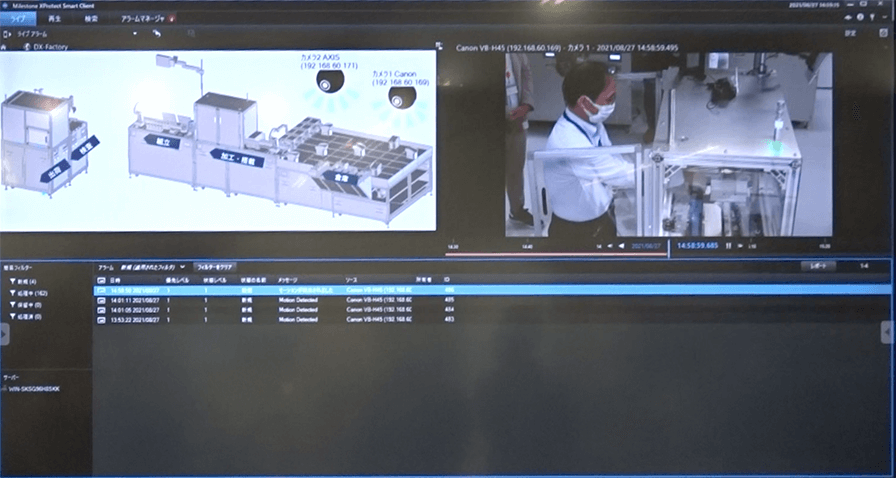
デモンストレーションでは、生産ラインの様子を撮影しており、モーションキャプチャの機能を使用して、パトライトが異常点灯したことをトリガーに、そこで何が起きたかをシステム上で検索できてビデオを再生できるようになっている。
モーションキャプチャによって、モーションを検出したらリストに表示されるようになっているので、ドアロックを解除した、立入禁止エリアに侵入したなどの動きを確認できるようになっている。
また、顔認証とも連携しており、事前に顔の登録をしておくと、それぞれの人の映像を表示できる。特定の人が何の作業をしていたかをあとから確認することができる。
AI映像作業解析
組立作業を人手で行う場合、ミスが発生する可能性がある。ミスしたまま、後工程にものが流れてしまうと、後工程に影響が出たり、市場問題に発展したりする可能性がある。
AI映像作業解析は、映像を使いAIが作業ミスを検出するというソリューションである。
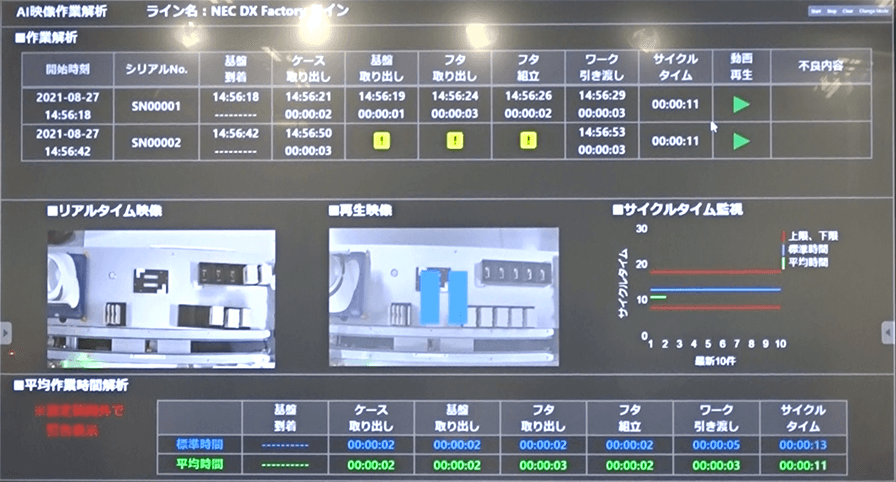
組立作業をする様子をカメラで撮影し、システム上では、リアルタイムな映像を確認することができる。間違った作業をすると、アラームが立ち、間違っていることを通知する。そこでラインを停止させることで、後工程に流すことを防ぐことができる。正しい作業の場合は、作業解析結果として、作業を行った時間とかかった時間を映像から導き出す。
事前に正しい作業を撮影し、その映像をもとにモデルを作成し、判断を行っている。
自律ロボティクス
自律ロボティクスのデモンストレーションの様子を撮影した動画。
NECでは、人とロボットの協調を考えている。これまで人間2人でやっていた作業を、1人をロボットに置き換えて、人とロボットが一緒に作業をするイメージだ。ロボットに重たいものを支えてもらって両手で作業したり、ロボットが手元まで部品を運んできたりすることで、作業性が改善できるのではないかと考え検討を行っている。
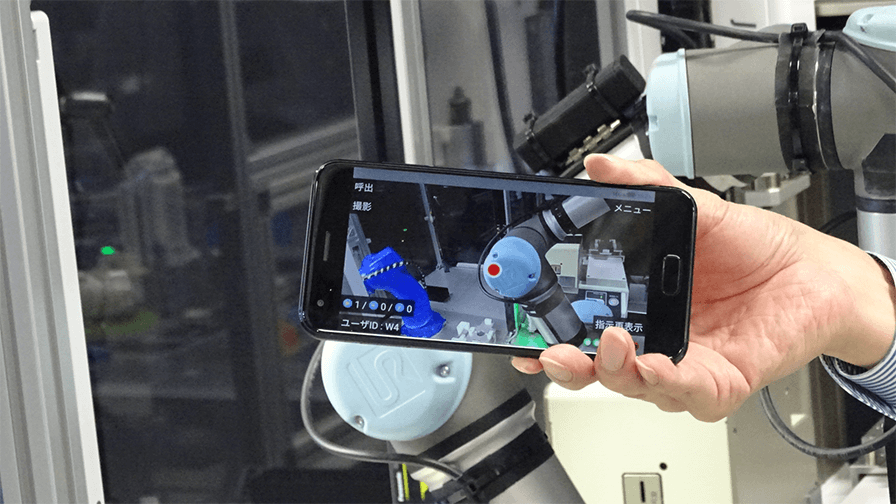
デモンストレーションでは、デプスカメラを設置しカメラで手の位置を測定し、その位置までロボットの軌跡を計算して部品を運んでいる。作業者はARマーカーがプリントされた手袋を装着しており、ARマーカーによって手の位置を検出することができているのだ。
手袋には、手の甲と手のひらの部分にそれぞれARマーカーがプリントされており、作業者が手のひらをカメラに向けると、ロボットに対して停止の命令を出すことができる。その後手の甲をカメラに向けるとロボットは次の部品を持ってくるようにプログラミングされている。
現在はARマーカーを利用してロボットに指示を出しているが、フィンガージェスチャー等の別のインターフェースを使用することも検討し、更に人とロボットが協調しながら共存して作業をする世界を検討しているところだという。
ロボット遠隔操作

工場で生産ラインのロボットが故障したり停止したりした場合、現状は生産技術者がロボットの近くまで来て、ティーチングペンダントを使用して対処するという方法が一般的な業務プロセスになっている。
しかし、こうした作業は将来的には無線通信を使用してリモート化していくべきだとNECでは考えている。現場には作業者がいない無人工場になっていて、何かトラブルが発生した場合は、遠隔からネットワーク越しにロボットを制御するような業務プロセスになるだろう。トラブルの状況を確認するためにカメラの映像を確認する必要が出てくるだろう。
デモンストレーションでは、装置の上部にカメラが2台設置されており、1台はWi-Fiにもう1台は5Gに接続されていて、差分を体験できるようになっている。
カメラで撮影された映像はシステム上で確認できるようになっている。作業者はティーチングペンダントを使用して遠隔から操作を行うが、ペンダント内にはPC上で動かせるソフトウェアが搭載されていて、ネットワーク越しに制御することができる。
遠隔業務支援システム
ロボット遠隔操作のソリューションは無人工場を想定したものであるが、工場が無人化していくプロセスの中では、有人だが作業者がどんどん減っていくタイミングが想定される。
特に熟練者がどんどん引退していき、熟練の技術を持った生産技術者は少なくなってしまい、各工場に人員をアサインできなくなってしまうということが起きるだろう。
そのような状況になると、熟練者は遠隔から複数の工場を支援するような業務プロセスになっていくのではないかとNECは想定している。
遠隔業務支援システムは、遠隔地から業務を支援するためのソリューションである。現場の作業者は、スマートフォンやタブレット端末、スマートグラスなどのカメラが搭載されたデバイスを使用し、現場で何が起きているかを遠隔にいる熟練者に見てもらい、支援を仰ぐというものである。
遠隔にいる熟練者は、画面上でポインターなどを使用しながら、ケーブルの配線が悪いのではないかなどといったアドバイスを送ることができるようになる。
ロボット遠隔操作と遠隔業務支援システムは、5Gを活用することで更に高精細な映像を遅延なく送ることができるようになるだろう。現場に作業者がいるときと同じような形で作業や支援を行うことができるようになることが予想される。しかし、実際は現状の通信でも十分に作業や支援を行うことができるユースケースもあるだろう。どのような状況ではどのような映像が必要になるのかを検討していく必要がある。
関連記事

大学卒業後、メーカーに勤務。生産技術職として新規ラインの立ち上げや、工場内のカイゼン業務に携わる。2019年7月に入社し、製造業を中心としたIoTの可能性について探求中。

















