

KDDI株式会社、アイサンテクノロジー株式会社、株式会社ティアフォーの3社は、本年12月14日、愛知県による平成29年度「自動走行実証推進事業」における幸田町での実証走行デモンストレーションとして、一般公道における遠隔制御型自動運転システムの実験を実施し(※1)、レベル4(無人運転)自動運転に成功したと発表した。
バスやタクシーなどが自動運転化されていく時代において安全な運転を実現するためには、走行状態を監視し、危険が生じた際に遠隔での車両制御を実施することが必須条件となっている。
また、人や障害物など動的情報をカメラで監視し、リアルタイムに判断・制御するためには、データ通信の安定性が重要となり、自動運転に適した通信ネットワークの構築が必要になる。
同実証実験では、運転席を無人の状態としたうえで、事前に構築した高精度地図をもとに車を自動走行させ、衝突などの危険を察知した場合に緊急停止などを行う遠隔制御を可能にした。
※1 警察庁が平成29年6月1日に策定・公表した「遠隔型自動運転システムの公道実証実験に係る道路使用許可の申請に対する取扱いの基準」をもとに実施
実証実験の概要
目的
バスやタクシーなどが自動運転化されていく時代において安全な運転を実現するためには、走行状態を監視し、危険が生じた際に遠隔での車両制御を実施することが必須条件となる。
3社は、無人の走行車両の遠隔制御実験を行うことで、遠隔制御の技術要件やネットワーク要件を検証していくとしている。
内容
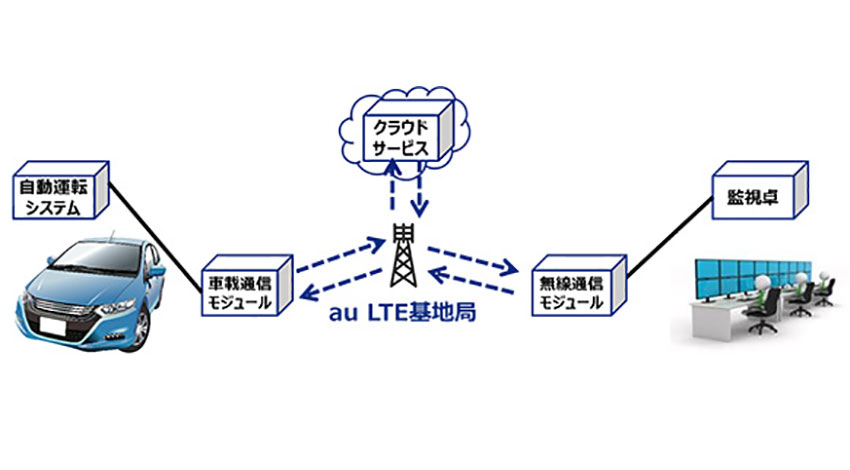
遠隔制御が可能となる制御卓と自動運転車両を通信システムでつなぎ、運転席が無人となる、レベル4自動運転を実証。
従来、運転者が走行中に目視で認識する情報に対し、操作者が車載カメラと監視システムを利用し遠隔監視を行った。
ハンドル、アクセル、ブレーキは自動的に制御され、車両が出発地から目的地まで自動運転を行い、衝突などの危険を察知した場合には、遠隔操作者等が緊急停止の措置を講じるデモンストレーションを行った。
実験車両
車両はトヨタエスティマを使用。事前に作成した高精度3Dマップを用い、LiDAR(ライダー)で周囲を検知しながら決められたルートを走行した。
各社役割
- KDDI:4G-LTEネットワークと、車載通信モジュール、および遠隔管制卓とクラウドシステムをつなぐ通信システムの提供
- アイサンテクノロジー:プロジェクトの全体統括と、自動運転車両および環境計測データの制御フィードバックに関する技術開発、高精度3次元地図(Adasmap)の作製
- ティアフォー:自動運転車両の制御用ソフトウエア開発、および遠隔監視・遠隔制御用操作システムのソフトウエア開発
【関連リンク】
・ケイディーディーアイ(KDDI)
・アイサンテクノロジー(AISAN TECHNOLOGY)
・ティアフォー(Tier IV)

無料メルマガ会員に登録しませんか?

技術・科学系ライター。修士(応用化学)。石油メーカー勤務を経て、2017年よりライターとして活動。科学雑誌などにも寄稿している。

















