
国立研究開発法人新エネルギー・産業技術総合開発機構(以下、NEDO)と株式会社ゼンリンは本日6月2日、3次元地図を用いたドローン自動飛行支援システムの実証実験を北九州市内の学校跡地で実施した。同実証実験では、実際の都市を模擬した環境として、学校跡地の校舎、樹木やフェンスなどを活用し、目的地までの基本飛行、障害物回避、バッテリー切れなどトラブル発生時の安全行動の3つのケースを想定した検証を行ったという。
今後、同実証実験で得られた知見をもとに、システムの改良を続け、2020年代頃からの実現目標が設定されている飛行レベル4“都市部等の有人地帯での目視外飛行”(※1)の早期実現を目指すとしている。なお、同事業は、昨年の経済産業省およびIoT推進ラボの第2回先進的IoTプロジェクト選考会議「IoT Lab Selection」(※2)で、準グランプリとして選定・表彰され、同会議の支援機関の1つであるNEDOの事業として採択・実施されている。
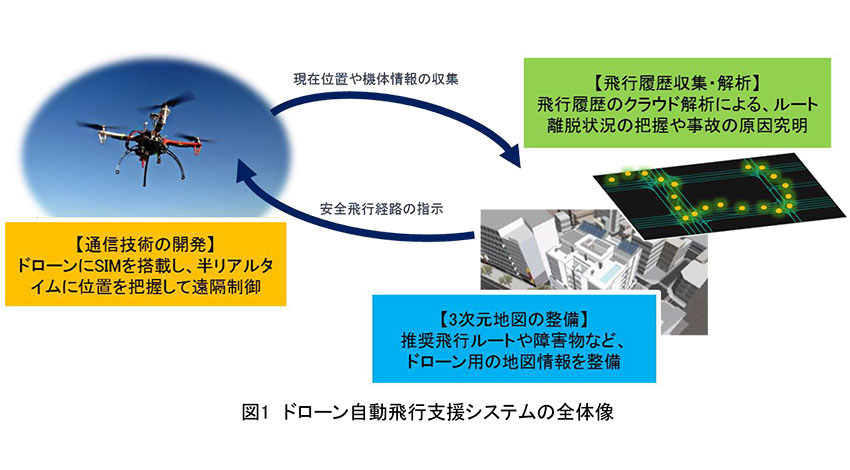
NEDOでは、さらなる技術シーズの発掘・育成や技術課題の解決を目的とし、IoT社会の実現に関連する周辺技術や技術課題の研究開発を推進している。その一環として、ゼンリンは、自律飛行による山間部や離島への物資の配送、災害時の対応など、社会課題の解決に活用が期待されるドローンを安全安心に運航させるため、「安全な飛行経路を示す3次元地図データ」、「移動体通信網を用いたドローンの制御プログラム」、「ドローンの状態をリアルタイムで把握する飛行履歴の解析技術」から構成される自動飛行支援システムを開発している。
今回、NEDOとゼンリンは、北九州市の協力のもと、同システムの評価・検証のため、同市内の学校跡地にて3次元地図を用いたドローン自動飛行支援に関する実証実験を実施。評価・検証内容は以下の通り。
- 基本飛行:目的地までの安全なルートの飛行
離陸し、グラウンドのネットと校舎の間を抜け、屋上へ着陸。 - 障害物回避:障害物や気象を判断し、適宜最適なルートの選択
グラウンドを離陸して校舎を目指す。途中、樹木などの障害物があり、それを安全に避ける最適なルートへ変更し、ゴールへ着陸。 - 安全行動:バッテリー切れなどトラブル発生を想定した安全な場所への着陸
離陸してネット沿いを飛ぶ途中で、トラブル発生を想定し、ルートを外れて最寄りの安全な着陸地点へ着陸。

※1 飛行レベル4“都市部等の有人地帯での目視外飛行”
2016年4月、小型無人機に係る環境整備に向けた官民協議会でとりまとめられた「小型無人機の利活用と技術開発のロードマップ」で整理された小型無人機(ドローン)の飛行レベル。現状の目視内操縦飛行をレベル1とし、目視内をレベル2、無人地帯(離島や山間部等)における目視外飛行をレベル3としている。レベル4が達成されると多数の自律飛行するドローンが活躍する社会が実現するという。
※2 IoT推進ラボの第2回先進的IoTプロジェクト選考会議「IoT Lab Selection」
IoTを活用した先進的で優れたプロジェクトを選定し、官民合同による資金支援や規制等に関する支援を行う会議。
【関連リンク】
・国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)
・ゼンリン(ZENRIN)
・経済産業省(METI)
・IoT推進ラボ(IoT Acceleration Lab)
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















