

技術課題へのアプローチ
最後にイーソル・佃氏はロボット開発において商用リアルタイムOSベンダーが取り組むべき課題と、そのアプローチについて説明を行った。
3つの技術課題
まず佃氏は課題として以下の3点を挙げる。
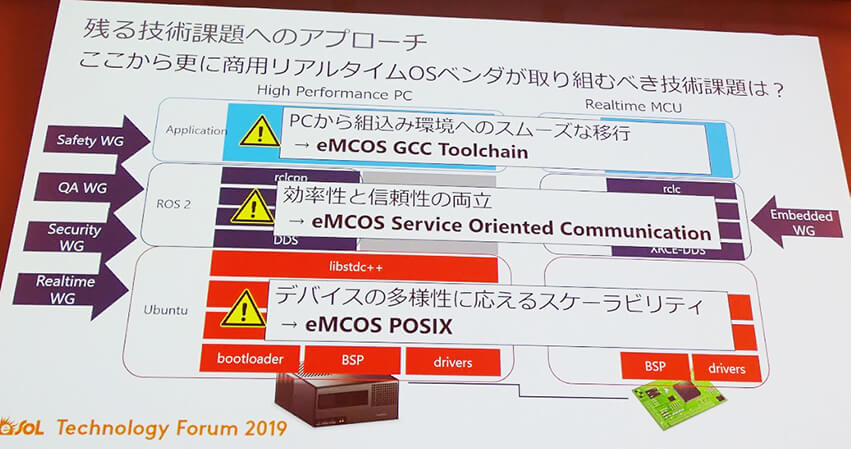
1つはデバイスの多様性に応えるスケーラビリティ。「ロボットは多様化していて、LinuxのハイパフォーマンスPCとEmbeddedのマイコンの一対一の関係だけで全てが解決できるものではない。多様化するロボットのデバイスに対応するスケーラビリティが必要だと考えている」と佃氏は言う。
2つ目はPCから組み込み環境へのスムーズな移行。これについて佃氏は「エッジコンピューティングとIoTデバイスというのは境界が曖昧になりつつある。つまりPCで開発したソフトウェアをいかに組み込みの環境に持っていくか、ということが課題になりつつある」と説明した。
3つ目は効率性と信頼性の両立であり、佃氏は「ROS2というのはDDSのプロトコルを導入することによってIPネットワーク上の効率性とか信頼性の両立を図っているが、よりデバイスの構成に即したコミュニケーション手段が必要だと考えている」と述べた。
課題に対するアプローチ
3つの技術課題を述べた後、佃氏は各課題に対するイーソルのアプローチについて説明した。
まずスケーラビリティの課題については、「開発中のOS「eMCOS POSIX」を適用する」とのこと。
「eMCOSは分散型のマイクロカーネルを利用することにより、シングルコアからマルチ・メニーコアプロセッサ、マルチチップまでいろんな構成に対応することができる。ロボットのノードは多岐に渡り、多様なプロセッサにそれぞれ得意なノードを割り当てていくプロセスが必要になるので、eMCOSというのは非常にフィットするのではないかと」というのが佃氏の見解だ。
組み込みへの移行については、「eMCOS GCC Toolchain」を適用するという。「「eMCOS GCC Toolchain」を使うことで標準的なROSの開発環境を使いながら、MCOS用のバイナリをクロスビルドすることができる。オペレーティングシステムやデバイスドライバは従来の開発環境を使って開発をすることが出来て、アプリケーション部分はROSのツールを使って検証することが出来る。こうすることで組み込み環境へのスムーズな移行を実現する。」と佃氏は説明した。
最後の効率性と信頼性の両立については、「eMCOS Service Oriented Communication」を用いると佃氏は述べる。
eMCOSがハードウェアの特性に合わせて柔軟な分散処理コミュニケーションを実現する、ネイティブの分散メッセージパッシングというものを提供しているという。
「ロボットは様々なノードで構成されているので、ノードによって必要とされる信頼のレベルや効率性は変わってくる。それらをチップ間に分散しつつ、チップ間の通信はハードウェアのアーキテクチャに最適化した効率的な分散処理を実現する」と佃氏は語った。

無料メルマガ会員に登録しませんか?

1986年千葉県生まれ。出版関連会社勤務の後、フリーランスのライターを経て「IoTNEWS」編集部所属。現在、デジタルをビジネスに取り込むことで生まれる価値について研究中。IoTに関する様々な情報を取材し、皆様にお届けいたします。

















