

株式会社式会社ZMPは本日、ステレオカメラ「RoboVision2」(ロボビジョン2)にハードウェアの改良を加えた「ステレオビジョンシステム RoboVision2s」の受注を開始した。
昨今、ADAS・自動運転技術の開発、またロボット技術の開発において、カメラでの環境認識の重要性はますます高まり、特にカメラだけで距離を算出できるステレオカメラの活用が注目されている。
ZMPでは2015年よりソニー製超高感度CMOSセンサーを用いたステレオカメラ「RoboVision2」を研究開発用に販売しており、「RoboVision2」で撮影した画像データから距離情報だけでなく、物体の検出ができるソフトウェアを搭載したステレオビジョンシステムとなっている。
今回のハードウェア改良では、レンズの性能向上及び光学ローパスフィルター追加を行っている。同改良により、従来製品に対し、1. レンズの改良により周辺の解像度アップが実現され、2. 光学ローパスフィルターの追加により、モアレや偽色の影響を低減させた。
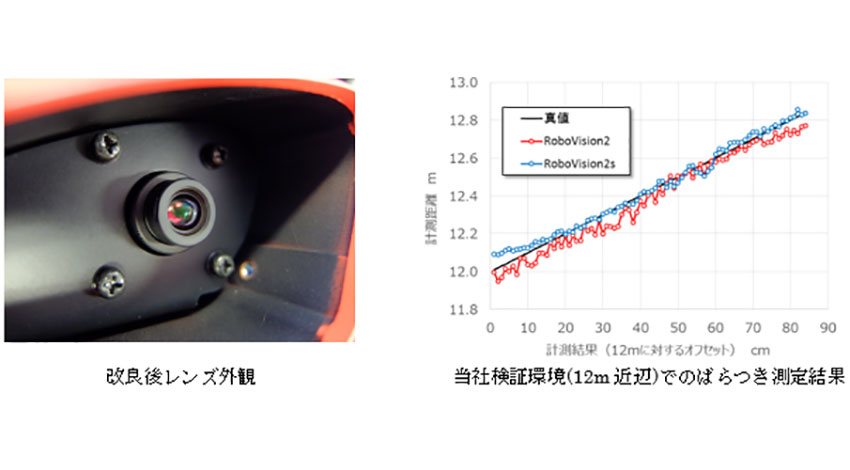
同製品を用いることにより距離計測をした際の計測距離の値の変化のばらつきを低減し、スムーズな測距結果が取得可能になるという。
実際、同社の検証環境において、カメラから対象物までの距離計測に関するばらつきが、改良前の製品と比較して約35%程度向上したことが確認された。これによりカメラ前方の対象物などの距離や相対速度の算出の際によりばらつきの少ない結果を計測可能なことから、検出結果を活用した物体検出や物体追従などの画像処理技術の応用に寄与することができるという。
価格は「Robo Vision2s」本体が90万円(税別)、処理用PCのセットで130万円(税別)で2018年2月中旬より出荷を開始するとしている。
「RoboVision2s」の主な仕様は以下の通りだ。
- カメラモジュール
- イメージセンサ:ソニー製1/3型有効127万画素、CMOSイメージセンサIMX224×2
- 解像度:1280×960ピクセル(30fps)、640×480ピクセル(120fps)
- 水平画角:45°
- インタフェース:USB3.0
- 基線長:210mm
- 機能:同期、ひずみ補正、ステレオ平行化、ワイドダイナミックレンジなど
- ソフトウェア開発環境(SDK)
- ライブラリ:カメラI/F、視差画像生成
- アプリケーション:RAW出力、ひずみ補正結果出力、視差画像出力
- 動作環境:Linux/Windows8.1
なお、同社の「RoboVision2」ならびに自動運転研究開発プラットフォームの詳細については以下の記事を参照されたい。
【関連リンク】
・ゼットエムピー(ZMP)

技術・科学系ライター。修士(応用化学)。石油メーカー勤務を経て、2017年よりライターとして活動。科学雑誌などにも寄稿している。

















