

最近よく耳にする自動運転という言葉。世界中の様々な企業が日進月歩で開発を進めており、自動運転に関する企業のプレスリリースを見ない日はないくらいだ。
日本国内において見ると、国土交通省は「官民ITS構想・ロードマップ2017」においてレベル4の自動運転を視野に入れている。
たとえば自家用車においては2025年を目途に高速道路での完全自動運転、移動サービスにおいては東京オリンピックのある2020年までに限定地域での無人自動運転移動を実現させるとして、今日本の各地で実証実験が行われている。
自動運転を実現するには、車両だけではなく安全な走行を可能にする各種センサー、距離計測(LIDAR)、画像認識、認知した情報を判断する人工知能、その計算処理を行う高速コンピュータ、それらを効率的に統合するOSなど、様々な技術が必要。
既存の完成車メーカーだけではなく、ソフトウェア、ハードウェア、センサーメーカーなど様々な分野のプレイヤーが競合、協業しながら自動運転の実現に向かっている状況だ。
そんななか、二足歩行ロボットからスタートしたロボットベンチャーのZMPは、自律走行ロボットに関わる技術を自社で開発し、東京のお台場など様々な場所で実証実験を始めている。
そんな自動運転開発で存在感を示すZMPについて、営業部長の龍(りゅう)氏に話を伺った。
はじまりは二足歩行ロボット

はじまりは二足歩行ロボットであるというZMP。会社名はZero Moment Point(動力学的な重心位置のこと)の略であり、二足歩行ロボットにおいて歩行を実現させるために重要な要素を指している。
これまでも、宇多田ヒカルの「Can you keep your secret ?」のPVにも登場した「PINO」シリーズ、「e-nuvo」、自律走行型音楽ロボット「Miuro」など、様々なロボットをリリースしてきた。
しかし、他社も様々なコシューマ向けロボットを打ち出してくるなかで、同社は人が運転するロボットに可能性を感じ、「自動運転」の事業に乗り出した。10年前時点では、まだ「自動運転」とネット検索しても「洗濯機」というワードが出てくるような時代だったという。
自動運転の研究開発プラットフォームRobocarへシフト
まず、最初に開発されたのが、「RoboCar 1/10」である。
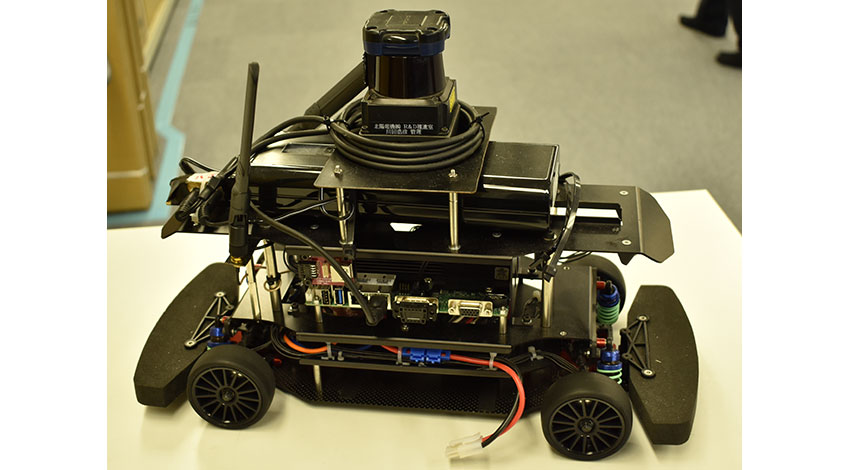
自動運転を始めるにしても、車両をつくることは難しい。そこで同社は、自動運転の研究開発をするためプラットフォーム製品をつくろうと考えたのだ。
最初は、上の写真にあるようなラジコン型のモデル(後付けの装置もついているが、半分より下が「RoboCar 1/10」である)。この小さなモデルには、自動運転を開発するのに必要なセンサーやカメラ、判断をするためのアルゴリズムを書ける領域、動作するためのサーボモーターなど一式がそろっている。つまり、これ一つで開発ができるのだ。
オールインワンパッケージ。手にしたその日からすぐに自動運転の開発に着手できることがコンセプトだ。
実際、ミリ波レーダーなどADAS技術(Advanced driver-assistance systems:先進運転支援システム)のトップメーカーであるコンチネンタルは、新人エンジニアの研修として最初の半年で「RoboCar 1/10」を使った自動運転の開発研修を行うケースもあるという。
わからないことがある場合は、ZMP側に電話で問い合わせるのも研修の一つ。このようなサポート体制込みで、コンチネンタルとビジネスパートナーとしての関係性を築いているというのだ。
コンチネンタル側も、自動運転においてはハードとソフトなど全てをシステムとして捉える必要がある考えており、このような研究開発プラットフォームは重要であると考えているようだ。
自動運転の”頭脳”も自社で開発
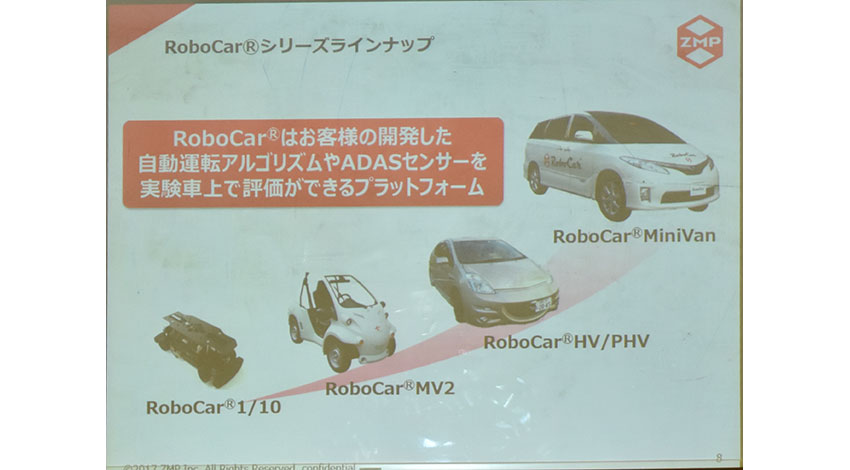
そして、実車でやりたいという顧客の要望もあり、トヨタ車体の超小型EV「コムス(coms)」、プリウスハイブリッド、そしてエスティマハイブリッドまで「RoboCar」ラインナップを揃えた。この研究開発プラットフォームをB2Bで提供、技術支援しながら同社も実証実験や研究開発を進めている。
これらのプラットフォームには、同社のロボティクス技術が加えられている。コンピュータから信号を送り込ませることにより、ステアリングやブレーキの操作をコンピュータで制御できるようになっているのだ。
それを担うのが同社オリジナルの「ZMO Autonomous Driving Controller」と呼ばれるコントローラーで、これを利用することにより、ステアリングやアクセルに信号が送られ、あたかも人間が動かしているかのように車を走らせることができる。
また、このZMP Contorollerソフトウェアより上位にあるオートウェアは名古屋大学がつくっており、それとパッケージにすることにより3D LIDARや単眼カメラをつけるなどの実験環境を構築することが可能なのだという(下図)。

また、車両とCMOSセンサー(ソニー製を使用)以外は、ほとんど全て自社で開発しているのがZMPの強みだという。自動運転に必要な3要素である「認知」・「判断」・「操作」の全ての機能を自社の技術で担う。
センサーが認知した情報を「判断」する言わば自動運転車の頭脳もZMPではつくっている。
それが、「IZAC」(Intel ZMP Autonomous Controller)だ。
記録・再生といった開発に必要な共通機能やビジュアライザーツール、各種センサーの数値などを入出力できるハードウェアインターフェイスがあり、最後に基本コンポーネントとして自己位置推定などの自動運転の基本コンポーネントが組まれている。
龍氏によると、この「ハードウェア入力」→「認知」→「判断」→「操作」に至るまでの各コンポーネントを、一体となったフレームワークの中で簡単につなぎ合わせられることが「IZAC」の強みだという。
ZMP社内はもちろんのこと、たとえば顧客が独自の自己位置推定のアルゴリズムをつくったとしても、あとから入れ替えることも付け加えることも、全て一つのソフトウェア上でできるのだ。
RoboCarの構造

実際に試験車両として活用している、トヨタ・エスティマベースの「RoboCar Minivan」では、フロントガラスの上の方にステレオカメラ(赤いカメラ)と二つの単眼カメラが装備されている。これらもZMP自社で開発した技術である。なお、単眼カメラは左が信号を認識し、右が白線を認識する。
ステレオカメラは、視差画像から前方との距離を計測するわけだが、さらに検出した物体の大きさ(幅、高さ、奥行き)や物体のカメラからの位置座標をリアルタイムにビジュアル表示する画像処理ソフトウェアも自社で開発している。
また、前方3個所(バンパーと左右)、後方2個所(左右)にあるセンサーによって、周囲360度の障害物を認識することができる。

そして、車の上方にあるのが3D LIDARセンサー。3D LIDARは周囲にある物体までの距離と方向を3次元で把握することができる。また、緑色の装置がGPSアンテナだ。
同社が現在走行実験を行っているお台場はゆりかもめが走っているため、その下に入るとGPSがほとんど使えなくなってしまうそうだ。本来であれば2, 3cmの精度で位置が決まるのだが、お台場の走行ルートでは10m程度もずれてしまうという。
しかしこのような場合は、さきほどのステレオカメラで作成したステレオマップと組み合わせることで位置精度を維持できるという。逆にステレオマップだけだとマッチングするものがなく最適化できないので、大体どこにいるかが特定できるGPSも必要なのだ。

こちらはRoboCar Minivan車内前方の様子。中央に見える黄色い物体が緊急停止ボタンだ。
宅配ロボット「CarriRo Delivery」
次に、最近六本木ヒルズの実証実験でも話題になった、宅配ロボット「Carriro Delivery」は、宅配ボックスが搭載された自律走行ロボットで、レーザセンサとカメラで周囲環境を360度認識しながら最大時速6kmで自動走行し、荷物を目的地へ届けることができる。
垂直移動から平面移動まで様々な状況を想定した実験が可能な六本木ヒルズを舞台として、今月より実証実験が開始されている。
CarriRo Deliveryにも先ほどの自動運転の頭脳「IZAC」が搭載されている。「IZAC」さえあれば、自律走行する様々なシステムを開発することができるのだ。
ゆくゆくはこのCarriRo Deliveryが歩道を走行することになるわけだが、そこには法規的な問題が立ち塞がるのだという。無人ロボットCarriRoが分類される法的なカテゴリーがまだ存在しないからだ。同社は規制緩和に向けて、経産省に同サービスの説明を始めているという。
物流支援ロボット「CarriRo」

CarriRoシリーズの原点は物流支援ロボットである。こちらは実用化のフェーズに移行しており、昨年9月より販売を開始している。
これは、力を加えなくても動き、また自分に後ろからついてきてくれる台車の役割を担う。普段、重い荷物の台車等での運搬業務にあたっている方にとって、魅力的なはずだ。
CarriRoにはドライブモードとカルガモモードの2種類の方法で動かすことができる。


一つ目はドライブモード。ジョイスティックを使って操作することで、力を加えることなく簡単に動かすことができる。写真中央のドアノブのような形をしたものがジョイスティックで、前に倒すと前進し、左右に傾けると曲がることができる。

二つ目はカルガモモード。上のようなビーコンを身につけておけば、CarriRoがそれを認識して後ろからついてきてくれる。


ロボティクス技術を活かし、ドローン事業も展開
さらに同社は、ソニーとの合弁会社エアロセンスを立ち上げ、ドローンビジネスも手掛けている。と言っても、ドローンを販売しているのではなく、ドローンを使った測量サービスを行っているのだ。
測量は本来とても時間がかかる作業だが、自律飛行可能なドローンに測量させれば、人の手を介さずデータをクラウド上にあげてすみやかに3Dモデルとして把握することができる。
また、垂直離陸型ドローンも開発している。垂直離着陸ドローンは離着陸に必要なスペースが少なくてすみ、また水平飛行時には高燃費で安定した飛行が可能になるというメリットがある。
同社は、食料や薬を運べるような垂直離陸型の小型ドローンを開発。アフリカのザンビアでエイズの検体を運ぶプロジェクトが進行中だという。
ザンビアではたとえ数kmでも、道路舗装されていない、橋がないなどのインフラ不整備により車だと何時間もかかってしまうとのことだ。しかし、ドローンであれば数分で届けることが可能になる。
ここにも、自律走行ロボティクス技術を持つ同社の強みが活かされている。
大事なことは、技術力とスピード
「ZMPはなにでビジネスをやっているのか?」とよく聞かれるのだという。
長期的には、CarriRo Deliveryとレベル4の自動走行タクシーのサービスを展開し、その過程では開発した様々なロボット技術も販売していく、というのが同社のビジネスモデルなのかもしれない。
現在はというと、そこに至る過程で得られたノウハウをフィードバックし、顧客製品の「高度化」「自律化」を支援するサービスがビジネスの中心にある。
実際、自動車に限らず建機や農機を自動化したいがどうすればよいかわからない、あるいは開発したものの試験の手段がないとして、同社に声をかけてくる企業は非常に多く、”駆け込み寺”のような状況になっているという。
カメラやセンサーなどのメーカーも大変だ。自社で車を改造などしても間に合わない。本当はアルゴリズム開発をやりたかったのに、検証を行うための車をつくっていたら無駄な時間がかかるというケースもあるだろう。
しかし、ZMPのプラットフォームを用いれば、各要素技術のメーカーはその過程をショートカットして自社製品の試験を行うことができるのだ。
その点、いち早く研究開発プラットフォームの開発に着手し、公道での走行試験のノウハウも蓄積している同社は優位性がある。
創業当時からの強みであるロボティクス技術を徹底的に積み上げてきたからこそ、このようなイノベーションが可能になるのだろう。
【関連リンク】
・ゼットエムピー(ZMP)

技術・科学系ライター。修士(応用化学)。石油メーカー勤務を経て、2017年よりライターとして活動。科学雑誌などにも寄稿している。

















