

京都リサーチパーク株式会社(以下、KRP)は、同社が運営する京都リサーチパーク(以下、KRP地区)で、デジタルツインによる自律走行型ロボットの走行実験を、2023年12月13日に実施する。
KRPは、2021年から2022年にかけて、京都スマートシティ推進協議会が推進する「京都ビッグデータ活用プラットフォーム」の「スマート街区WG」に、実証実験のフィールド提供者として参画してきた。
その一環として、2022年には芝浦工業大学の新熊亮一教授の研究室および、新熊教授が設立した大学発ベンチャーである株式会社ハイパーデジタルツイン(以下、HDT)と、デジタルツインを用いたテイクアウトフードの運搬実験を行った。(トップ画:前回の実験の様子)
前回の実験結果を継承し、今回は第二段階として、「デジタルツインの技術強化をし、仮想空間での交通規制(混雑回避や衝突のリスク軽減)を実現」「走行ロボットの台数と走行ルートを増加」といったバージョンアップを行い、実施する。
新熊研究室は、デジタルツインを用いた自動運転の研究に取り組んでいる。屋外環境に複数台設置したLiDARというセンサで死角や障害物などの空間情報と、歩行者や車両といった動的情報を取得し、デジタルツイン情報を仮想空間上に自動生成し、自動走行する車両やロボットに提供する。
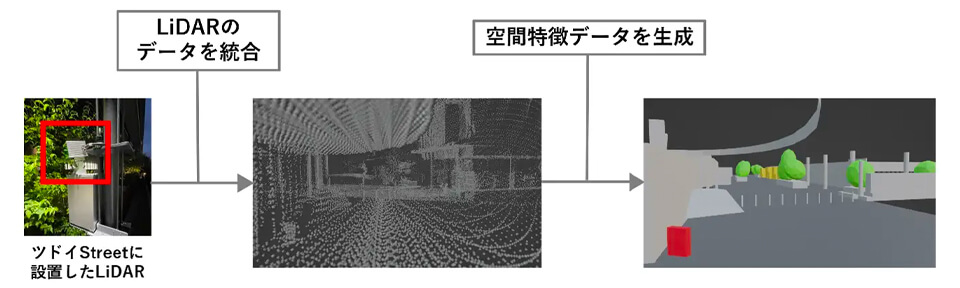
今回の実証実験では、フードトラックが集積するエリア「ツドイStreet」に計6台のセンサを設置し、デジタルツインを用いて空間特徴データを生成する。そして生成したデータをもとに、自動走行するロボットの動きの正確性を検証する。
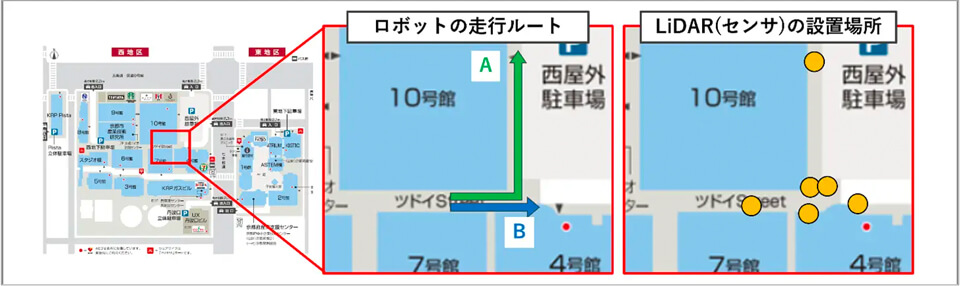
具体的には、10号館南面のフードトラックが集積する「ツドイStreet」に計6台のLiDARを設置し、LiDARから取得・生成したデータは自動走行型のロボット計2台とリアルタイムに連携する。
ロボットはデータに基づき、下図の矢印で図示した経路を通って、フードトラックのテイクアウトフードを利用者が待つ目的地まで、リアルタイムに障害物を避けながら、約60~80メートル先の目的地まで自動走行で運搬する。
なお、今回の実証実験で用いられている研究成果は、国立研究開発法人情報通信研究機構の委託研究により得られたものだ。

無料メルマガ会員に登録しませんか?
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















