
川崎地質株式会社は、富士通株式会社のAIエンジンを活用することで、道路陥没の原因となる地下空洞をより的確に発見できる路面下空洞探査技術を開発し、2017年夏にサービス提供を行う。
今回、富士通のディープラーニング基盤サービス「FUJITSU Cloud Service K5 Zinrai(ジンライ)プラットフォームサービス Zinraiディープラーニング」(以下、Zinraiディープラーニング)を、川崎地質の地中レーダー探査装置で収集する膨大なレーダー画像の解析処理に活用することで、これまで専門技術者が目視で判定していた地下空洞の探査性能の向上や効率化を図る。
また、株式会社富士通交通・道路データサービスが提供する、地図上に調査位置をマッピングし可視化するサービスと連携することで、路面下の空洞の位置を適切に把握し、道路修繕の必要性を自治体などに提示していくという。
国内では、道路の路面下空洞に起因する陥没事故は年間約3,300件発生し、社会的な問題となっている。陥没が起こる主な原因は、地下3mに多く設置されている下水道管の老朽化によるもので、道路を掘り返して調査しなくても危険性を把握できるシステムのニーズが高まっている。
現在、川崎地質が開発した地中レーダー探査装置により、従来地下1m程度だった地中探査を地下5m程度まで検出することが可能となり、今後の路面下空洞探査の信頼性向上に大きく期待が寄せられている。しかし、地中レーダー探査装置が収集した膨大な画像データから熟練した専門技術者が目視により判定しているため、客観性の担保や増大する作業負荷が課題となっている。

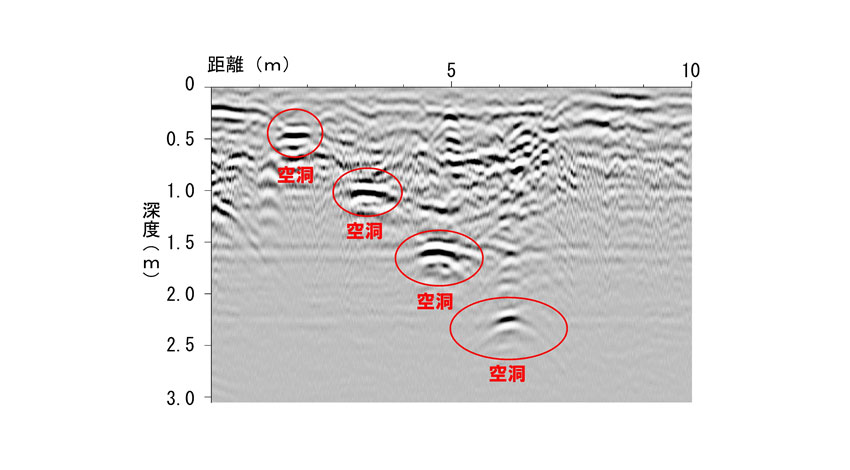
川崎地質の路面下空洞探査技術で撮影される膨大なレーダー画像の解析処理を、富士通が2017年4月より提供開始したディープラーニング基盤サービス「Zinraiディープラーニング」により画像解析を行う。レーダー反射の変化で波形として現れる画像を機械学習し、空洞か下水道管か、AIが判別するという。
空洞判定の検証を行った結果、従来の専門技術者による目視で行った場合と比較し、AIによる空洞探査は、画像データから的確に空洞であることを判別できたほか、10分の1の時間で解析。
今後、川崎地質は、AIによる路面下空洞探査に、富士通交通・道路データサービスが提供する調査位置などを一元的に可視化するサービスとの連携や地中レーダー探査装置の小型軽量化を進め、自治体などを含めて広く自動計測作業ができるサービスを目指し、より効率的な道路維持管理を支援していくという。
また、日本国内に限らず、世界的に社会課題となっている道路の陥没において、川崎地質の最先端の路面下空洞探査技術をグローバルに展開していくとしている。
提供:富士通
【関連リンク】
・富士通(FUJITSU)
・川崎地質(Kawasaki Geological Engineering)
・富士通交通・道路データサービス(FTRD)
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















