

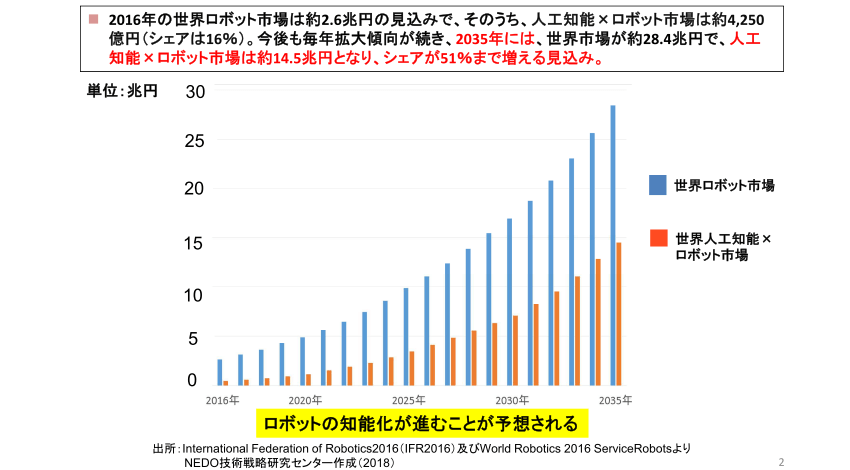
NEDO技術戦略研究センターによれば、世界のロボット市場は拡大傾向にあり、2016年時点で2.6兆円、その約20年後の2035年には28.4兆円規模まで増加していくという。
その28.4兆円という市場規模のうち、14.5兆円分は人工知能を搭載したロボットだ。
例えば、ここ数年、物流倉庫の現場は、人件費の高騰やECサイトの普及に伴う個配送の増加によって、負荷が増大しているので、人工知能を搭載したロボットが活躍していることがある。
具体的にはピッキングの自動化などが挙げられる。ピッキングとは、作業員がこれから出荷する商品を、保管棚から拾い上げる作業をいう。
このピッキング作業は骨の折れる作業で、1日にたくさん入る注文を正確に捌き続けなければならないし、注文内容がまちまちだとすると、取りに行かなければならない商品が置かれている棚もばらばらなので、庫内のあちこちを歩き回らなければならない。
しかし、人工知能を搭載したロボットであれば、こうした効率の悪い作業を効率化することが可能だ。一例を上げると株式会社ギークプラスの「EVE」はルンバのような形をしていて、ピッキング対象商品が保管されている棚を下から持ち上げて、自動的に作業者のところまで運んできてくれる。

そのため、作業者は一箇所にとどまって、EVEが運んできた棚から、対象となる商品をピッキングし続ければよく、歩き回るという無駄な時間が発生しない。
では、EVEはなぜ、自律的な走行(移動)が可能なのだろうか。
方法は2つある。
1つ目は、あらかじめロボットの可動範囲を決めて、可動範囲内の床に等間隔にQRコードを貼付する方法だ。ロボットはQRコードから現在位置を正確に読み取って、棚を移動・配置する。
2つ目は、SLAM(Simultaneous Localization and Mapping)というナビゲーションシステムだ。SLAMは様々なセンサーを用いてロボットが周囲の環境を認識するための仕組みで、ルンバのような自律走行ロボットにも使われている。
SLAMとQRコードとの違いは、SLAMでは、あらかじめロボットの稼働範囲を決めず、はじめての環境でもロボットが動き回ることができるという点だ。
では、自律走行ロボットに使われているSLAMとは、どのようなものか。
真っ暗闇のなかを歩くには
当然、ロボットは視覚が無いので、人でいうと真っ暗闇のなかをさまよっている状況だ。では、真っ暗闇のなかを歩くにはどうすればよいのか。
必要なのは、自分の位置を知り(自己位置推定)、地図を作る(環境地図作成)ことだ。
SLAM(Simultaneous Localization and Mapping)はこの自己位置推定と環境地図作成を様々なセンサーを組み合わせて実現する仕組みをいう。
なぜセンサーを組み合わせるのかというと、センサはそれぞれ長所・短所があるためだ。したがって、複数のセンサーを用いて短所を補い合う必要が出てくる。
では、どのようなデータを取得するために、どんなセンサーが使われているか紹介する。
位置測定データ:GPS
GPSは衛星から信号を受け取って、現在位置を検出するセンサーだ。非常に便利だが、cm単位の精度は出ない。また、都内や山間部の場合、建物や山々が遮蔽物となり衛星からの電波が反射してしまう。屋内においても同様だ。
距離測定データ:LiDAR(ライダー)
LiDARはレーザー光を使ったセンサーで、「ligh detection and ranging(光による検知と測距)」の頭文字を取った言葉だ。レーザー光を照射してから物体にあたって戻ってくるまでの時間を計測することで、物体の距離や方向が分かる。
自律走行ロボットだけでなく自動運転を実現するためのコアセンサーと言われている。しかし、製造コストが高いという欠点がある。
画像データ:ステレオカメラ
ステレオカメラとは、三角測量の原理を応用した2眼のカメラだ。ステレオカメラを用いると、対象物を2つの方向から同時に撮影できる。そして、それぞれが撮影した画像に映っている対象物の画素位置の差から、カメラから対象物までの距離を測定することができる。
安価であることが長所だが、距離の計算に時間がかかってしまうためリアルタイム性が無いことや、暗いとデータが得られないという短所もある。
以上3つ紹介したが、ジャイロセンサー、磁気センサー、加速度センサー、レーダーセンサーといったセンサーも使われている。
ロボットはこうしたセンサーを組み合わせ、環境をセンシングしながら、自分の位置を推定しつつ、地図の作成を行うことで自律的な走行を可能にしている。
そしてこの仕組みをSLAM(Simultaneous Localization and Mapping)という。
現在、デジタルをビジネスに取り込むことで生まれる価値について研究中。特にロジスティクスに興味あり。IoTに関する様々な情報を取材し、皆様にお届けいたします。

















