TOP >
ロボティクス > KDDI総合研究所とTelexistence、遠隔操作ロボット用映像伝送技術で50ミリ秒の低遅延映像伝送を実現
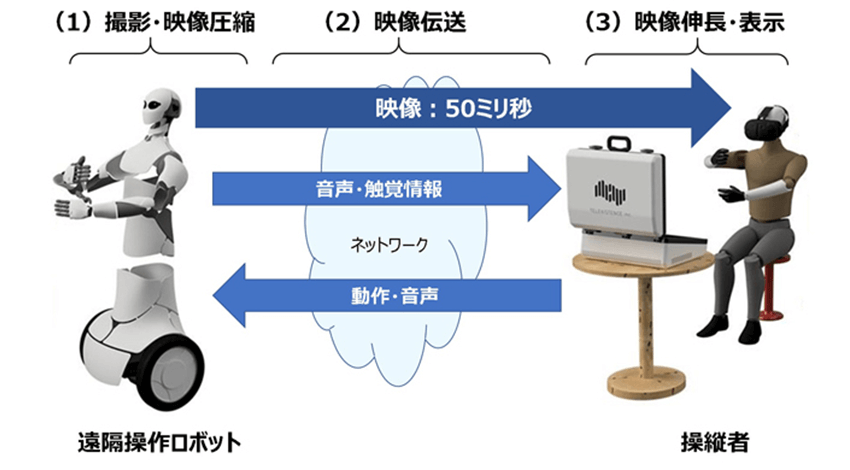
遠隔操作ロボットは、VRグラスを装着した操縦者がロボットから伝送される映像を見ながら操作を行う。映像伝送に伴うEnd-to-End遅延がおおよそ100ミリ秒を超えると視覚と操作のずれを大きく感じるため、低遅延化が実用化に向けての課題だ。
映像伝送のEnd-to-End遅延は、(1)ロボット側におけるカメラからの映像取得と映像圧縮、(2)ネットワーク遅延を含む映像データの伝送、(3)操縦者側における映像伸長と表示という大きく3つの要因に起因していて、映像伝送システム開発においては、撮影から表示までのすべてのプロセスにおける徹底的な処理の最適化が重要となっている。
株式会社KDDI総合研究所とTelexistence株式会社(以下、TX)は、TXが開発する遠隔操作ロボットを対象に、ロボットと操縦者間の映像伝送において、ロボット側のカメラから操縦者側のディスプレイに表示されるまでのEnd-to-End遅延を50ミリ秒にすることを実現した。
これにより視覚と身体感覚との操作のずれをほぼ感じることがなくなり、動きの速い対象物に対して正確な操作や身体的直感に即した操作が可能になる。また、映像伝送遅延が原因の一つとされる操縦者のVR酔いが軽減され長時間の遠隔操作が可能になるという。
同映像伝送は、KDDI総合研究所の汎用ハードウェアコーデックを用いた映像パラメータや処理フローの最適化技術と、TXのロボット用映像機器の実装・最適化技術により、実現している。
無料メルマガ会員に登録しませんか?
膨大な記事を効率よくチェック!
IoTNEWSは、毎日10-20本の新着ニュースを公開しております。
また、デジタル社会に必要な視点を養う、DIGITIDEという特集コンテンツも毎日投稿しております。
そこで、週一回配信される、無料のメールマガジン会員になっていただくと、記事一覧やオリジナルコンテンツの情報が取得可能となります。
- DXに関する最新ニュース
- 曜日代わりのデジタル社会の潮流を知る『DIGITIDE』
- 実践を重要視する方に聞く、インタビュー記事
- 業務改革に必要なDX手法などDXノウハウ
など、多岐にわたるテーマが配信されております。
また、無料メルマガ会員になると、会員限定のコンテンツも読むことができます。
無料メールから、気になるテーマの記事だけをピックアップして読んでいただけます。
ぜひ、無料のメールマガジンを購読して、貴社の取り組みに役立ててください。
無料メルマガ会員登録
大学卒業後、メーカーに勤務。生産技術職として新規ラインの立ち上げや、工場内のカイゼン業務に携わる。2019年7月に入社し、製造業を中心としたIoTの可能性について探求中。
DX実践ノウハウ解説

BPMSで、業務改善にとどまらない、業務改革を行う方法

DX実践講座

業務プロセス改善のDXで使う「ECRS」とは、具体例や使い方を解説

業務改善のためのDX、5つの基本ステップ

DX人材の6つの役割と必要なスキル

DXを加速する、アジャイル型組織とは

攻めのDX、守りのDX

DX戦略を作るのに必須となる、5つのビジネスフレームワーク
DX時代の正しい事例の読み解き方(事例マニアはNG)
DXトレンド解説

メタバース、VR・ARの基礎と活用事例
ウェアラブルとは?ウェアラブルデバイスのビジネス活用事例10選

DXとは?本質をわかりやすく解説

IT、IoTとICTとの違い
スマートホームの基礎とトレンド

VUCA時代を生き抜くための、デジタルトランスフォーメーションとIoT
国内・海外スマートシティDX事例10選
都市のDXが進む「スーパーシティ」構想とは?