
株式会社デンソーウェーブが主催したWEB展示会「DENSO Robotics Online Expo 2020」が、2020年7月16〜18日で開催された。
本稿では、デモンストレーションツアーからいくつかのデモの様子を動画を交えて報告する。
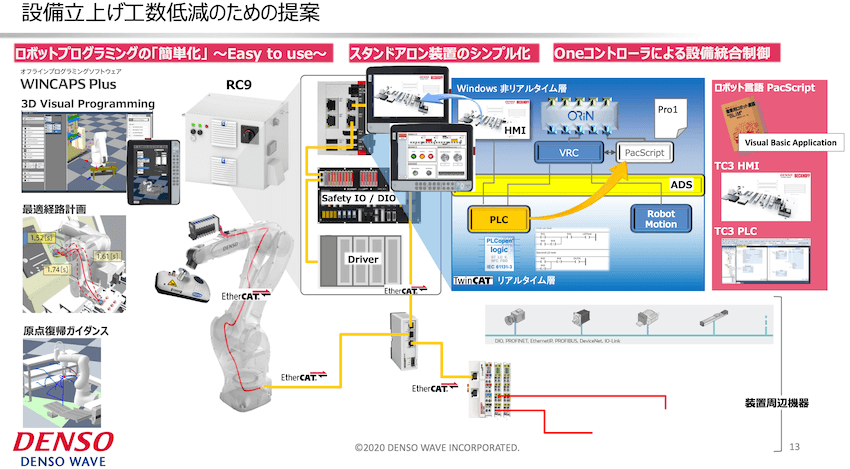
ロボットコントローラRC9が実現する統合制御

デンソーウェーブの新しいロボットコントローラ「RC9」をマスターとして設備全体をコントロールしているデモンストレーションだ。RC9は、PLCによるリアルタイム制御、HMIによる操作パネルの作成、コンベアとロボットハンドのIOをEtherCATケーブル1本で、接続し拡張することで、設備全体の制御を統合し、ワンコントローラの設備を作ることができる。
PLCはベッコフオートメーション株式会社(以下、ベッコフ)製を使用していて、製造業従事者が使い慣れたラダー回路も搭載されているため、移行もしやすいだろう。
RC9では、PLCプログラミングと、HMIの作成をベッコフの統合開発ソフト「TwinCAT XAE」で行う。
今回のデモでは、ロボット制御用のファンクションブロックによるラダーの制御とHMIを活用してロボットの操作パネルを作成し、ロボットが起動できるようにしている。
同じ「TwinCAT XAE」の画面の中で、HMIを活用し、コンベアのステータスを見ながら、各個操作をすることもできる。
生産設備が複雑になると、その制御や調整も複雑になると考えられる。設備全体の統合制御ができることで設備立ち上げ工数を削減できる。
電子カムを用いたリアルタイム同期制御

RC9は、TwinCAT上で動作するアプリケーションと連携することができる。紹介するデモンストレーションは、電子カムを用いてそのリアルタイム制御を紹介している。
電子カムとは、アクチュエータに送る信号により動作を変えるシステムのことだ。電子カムを使用することで、複雑なプログラムを作成しなくても、RC9とEtherCATでつながるアクチュエータとの同期した動作が可能になる。また、設備全体の速度コントロールが可能になるため、日によって生産量が変わる設備などに適している。
デモでは、電子基板にコネクタを組み付けたり解体したりする動作を行っている。
電子カムは、機械カムと同様に、マスター軸とスレーブ軸の構築になっている。電子カムは、マスター軸を0°から360°の動作範囲で表現し、マスター軸の速度を可変することで、スレーブ軸の速度を調整することができる。
電子カムを使用するためには、動作パターンを作成する必要がある。設備の中で必ず通過させたいポイントを各スレーブ軸ごとにプロットする。それらの動作ポイントを補完し、各スレーブ軸ごとの動作パターンを作成する。今回のデモでは、ベッコフが販売しているカムデザインツールを使用し、動作パターンを作成している。
マスター軸を動かすことで各スレーブ軸の位置が一意に決まるので、主軸の速度を変更することで設備全体の速度コントロールが可能になる。電子カム以外にもリアルタイムの同期制御を行うことが可能だという。
多品種少量生産が主流になると見込まれている中で、生産量の増減に対応する設備の需要は今後増えていくのではないか。
模倣AIパッケージ

続いては、AI模倣学習エンジンのデモンストレーションだ。
生産工程の中で軟体物や不定形物を取り扱うような作業は、言語化できない動作が多く、言語化できない動作はプログラミングにも落とし込みにくい。
言語化できない動作とは、力をグッと入れる、ここをグニュッと曲げるなどの人の感覚に頼った手順で組み付ける動作のようなことを言う。このような動作を、人の動作を模倣させてロボットに動作させることができるのが、模倣AIパッケージであるという。
学習データは、デンソーウェーブが発売している小さな人協働ロボット「COBOTTA」をマスターの様に使用して、Master&Slaveの関係を構築し、実際に生産工程で使用するロボットにCOBOTTAの動きを真似させながら収集する。COBOTTAを作業者が手で動かすと、スレーブのロボットが、真似をして動くようになっている。
今回のデモでは、液体を秤量するという工程をイメージし、人の動作を真似させながらデータを収集したという。
AIソフトウェアは、学習データとその時のカメラ画像や秤の値など他のデータを閲覧しながら学習させることができる。学習モデルを作成したあと、推論をソフトウェア上から行うことができる。AIがロボットの状態や秤の値などを逐次確認しながら推論を行うためロボットは振動しながら動作を行うようになる。
筆者は、生産ラインを導入するタイミングで、開発部門が手組みで作った開発試作品と生産ラインが自動で作った量産試作品で出来栄えや機能が変わってしまったということを経験したことがある。微妙な手の感覚をロボットで再現することはこれまで難しく、手戻りの原因になっていたのではないかと推測する。
こうした模倣AIを活用することで、開発から生産へのスムーズな連携や、手組みラインと自動機ラインの差異をなくすといったことが実現できるのではないだろうか。

大学卒業後、メーカーに勤務。生産技術職として新規ラインの立ち上げや、工場内のカイゼン業務に携わる。2019年7月に入社し、製造業を中心としたIoTの可能性について探求中。

















