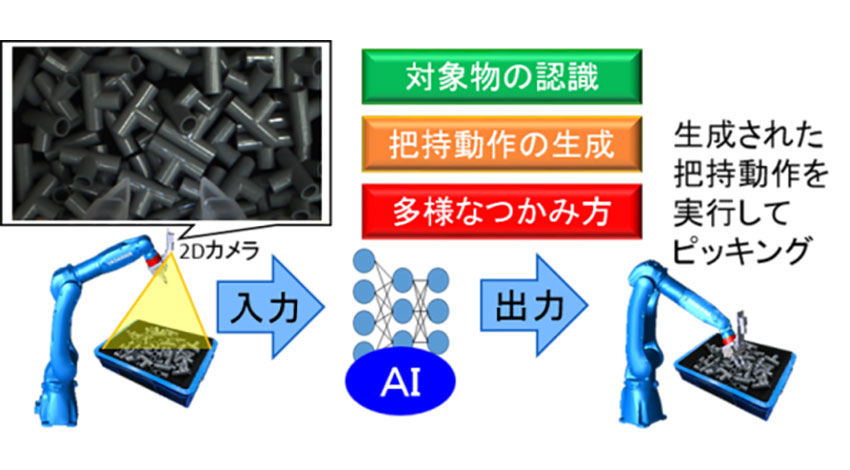
株式会社安川電機は、製造業向けのAIソリューションを提供する株式会社クロスコンパスと共同で、ロボットによる対象物の認識・把持(はじ)動作の生成・多様なつかみ方を自ら学習するAIピッキング機能を開発したと発表した。
開発の背景とねらい
近年、生産ライン自動化ニーズの多様化により、ロボットに求められる作業のレベルが高度化している。従来のバラ積み部品のピッキングシステムでは、対象物ごとに多様な把持動作を教示する必要があり、ユーザーにとって大きな負担となっている。
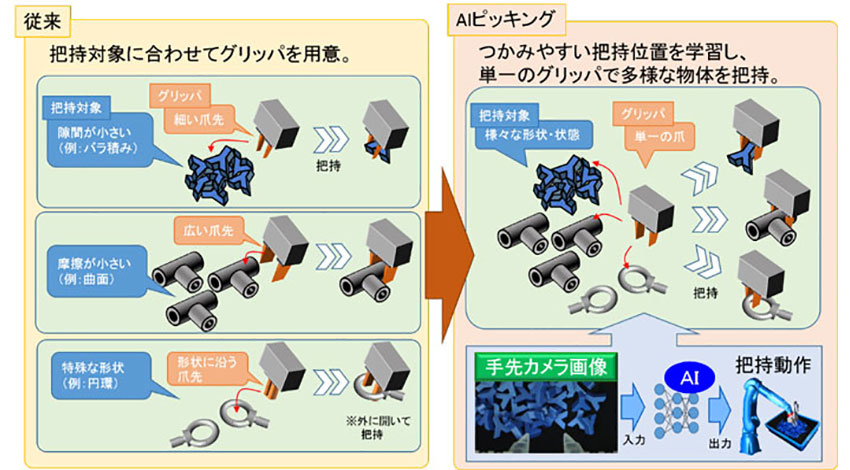
また、把持を確実に実行するために、対象物に合わせてグリッパ(ロボットアームの先端に取り付けて把持動作を行う器具)を専用設計し用意する必要があり、システム導入への障壁の一つとなっていた。
安川電機では、長期経営計画「2025年ビジョン」で、新しい自動化のソリューションを提供することを掲げており、これまでのソリューションにデジタルデータのマネジメントを加えた、新たなコンセプト「i³-Mechatronics(アイキューブ メカトロニクス)」を始動している。
今回、開発したAIピッキング機能は、このコンセプトを具現化するソリューション提供の一環としており、同社のコア技術であるロボット技術と、クロスコンパス社のAI技術を組み合わせることで、バラ積みピッキングの高度化による自動化システム導入の簡易化、生産性の向上を実現していくとしている。
同機能は、ロボットアームの先端に取り付けたカメラからの画像情報をコントローラに入力し、AI(ディープラーニング)を用いてロボット自らリアルタイムに動作を学習・生成するため、教示が不要となる。
把持動作中も取得した画像情報をもとに最適な把持位置を解析しながらピッキングを実行するので、対象物の形状や一定の把持位置・方向に合わせたグリッパの設計が不要。
さらに同じグリッパを用いて多数の対象物を学習することで、単一グリッパで多数の物品をピッキングすることができるため、効率的なピッキングシステムが構築可能となる。
部品配膳システムや仕分けシステムへの適用を見込んでおり、今後はより多くの対象物や環境での実証を蓄積し、把持率の向上や対象物の拡大などに取り組んでいくという。
主な特長
1. 把持動作の教示レス化
AIにより、ロボットアーム先端の2Dカメラで取得した画像を解析し対象物品の認識・把持動作の生成・多様なつかみ方を学習。これによりピッキング実行時には、自動で対象物の状態に合わせた把持動作を生成することができる。
学習したAIはロボットに依存しないため、教示作業を省略して他のロボットに移植することが可能となる。
2. 単一グリッパによる多種の対象物把持
現状のロボットを用いた複数物品のピッキングシステムでは、多くの場合グリッパを対象物ごとに変更して把持動作を行っている。
同機能では、同じグリッパで学習を行うことで、AIが多様なつかみ方を自動で獲得することができるため、単一グリッパで多種の対象物に対応したピッキングシステムを構築することができる。
3. 2Dカメラによる低コスト化
現状のバラ積みピッキングシステムでは3Dカメラを用いたシステムで高精度に対象物の位置姿勢を認識してピッキングを行うのが一般的だ。同機能では、安価な2Dカメラの画像で学習を行うため、低コストでシステムを導入することができる。
【関連リンク】
・安川電機(YEC)
・クロスコンパス(XCompass)
無料メルマガ会員に登録しませんか?

技術・科学系ライター。修士(応用化学)。石油メーカー勤務を経て、2017年よりライターとして活動。科学雑誌などにも寄稿している。