

先月行われた設計・製造ソリューション展のレポート第三弾はMUJINだ。
すべての産業で使える様々なロボットを作る同社だが、今回の展示でも、様々なロボットが展示されていた。
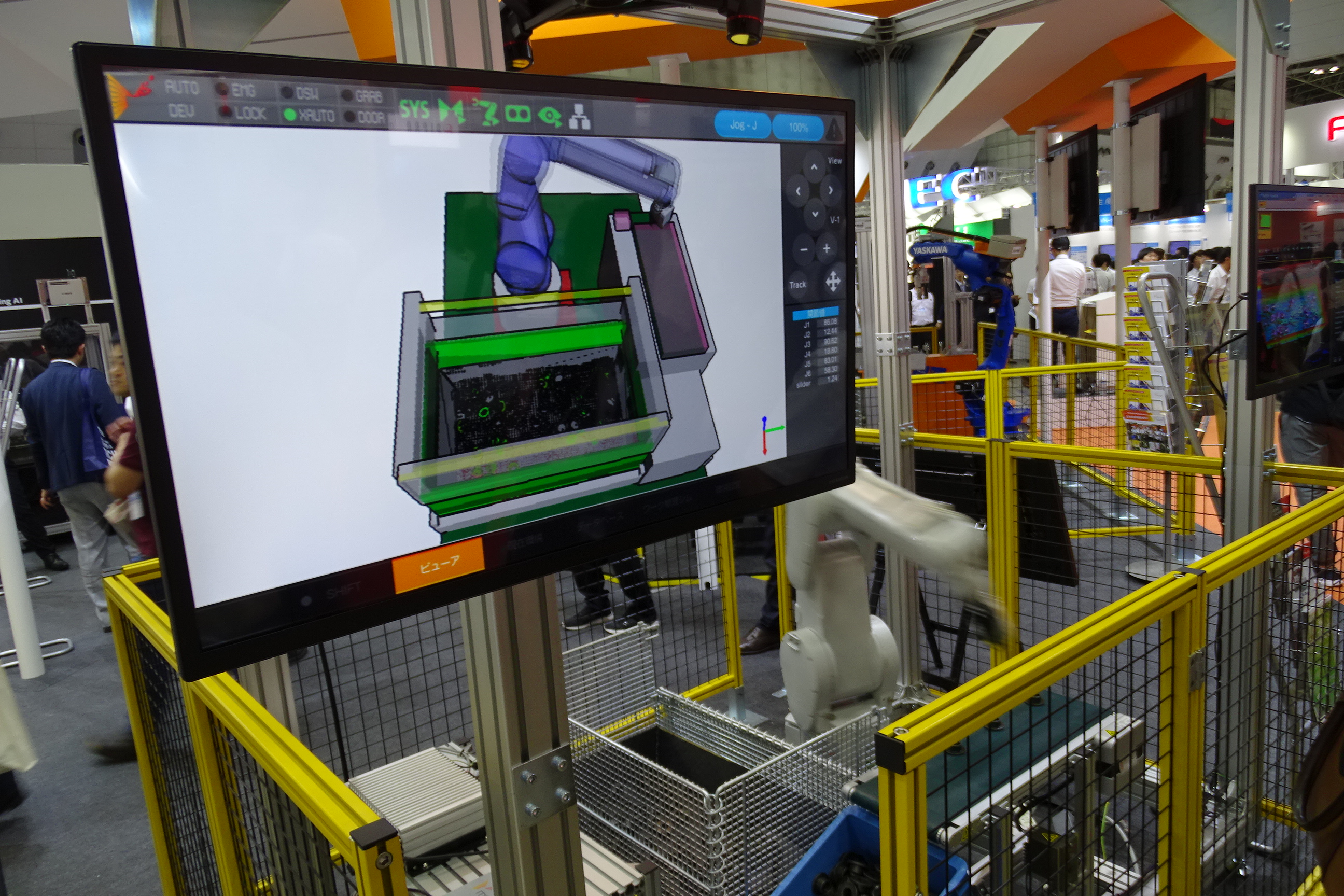
バラ積みピッキング

画像認識エンジンとロボット制御技術を合わせることで、バラ積みされているモノをロボットアームが器用に摘み上げ、必要な方向にそろえて並べて配置することができる。
「バラ積み」とは、乱雑に置かれている積み方だと思えばよいのだが、通常のロボットであればきれいに並べられたものをつまむことは簡単だが、乱雑に格納されているものをつまむことはできない。
実は、工場などでは、こういったことをロボットができないために、ヒトがこの作業を行っていた。
しかし、このバラ積みピッキングができたことで、ヒトの稼働なしにピッキング作業ができるようになるのだ。

モーションプランニングAIによる、自動干渉回避行動
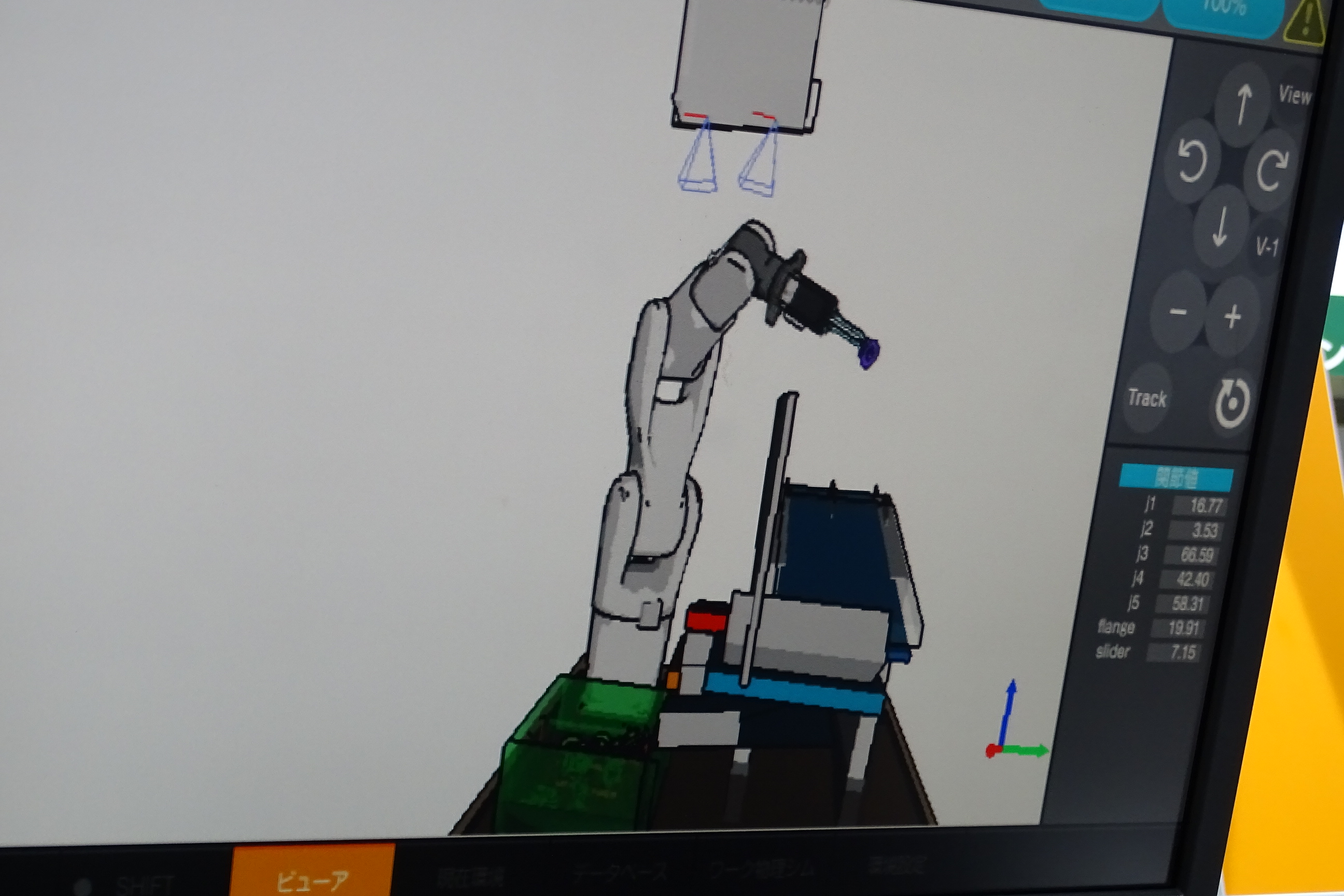
さらに、バーチャル空間上に展開された設計図面の中に、実際の利用環境を構築しておくと、バーチャル空間上に設置された壁をよけることができるという展示がされていた。
この展示では、モーションプランニングAIが、干渉回避の動作を自律的に行うことができるのだという。利用者の作業としては、スタート地点とゴール地点を定義するだけで、自律的に障害を回避することがシミュレーション上実現できているのだ。
もちろん、この動作は実機でも行うことができる。

モーションプランニングAIは、プログラムを変更したり、ティーチングをやり直すことなく障害回避をすることができるところがすごい。
また、実際にロボットが非常停止をした場合、通常復旧に時間がかかる。ホームポジションに戻す際は、ジョブ動作で戻すか、専用のプログラムで戻す必要があるため、夜中にこういった状況になったら、担当者は呼び出されることになる。

しかし、モーションプランニングAIを使ったロボットでは、ホームボタンを押すだけで、干渉を回避しつつ元に戻すことができる。つまり、オペレーターだけで非常停止を回避することもできるということだ。
参考:
株式会社MUJIN

IoTNEWS代表
1973年生まれ。株式会社アールジーン代表取締役。
フジテレビ Live News α コメンテーター。J-WAVE TOKYO MORNING RADIO 記事解説。など。
大阪大学でニューロコンピューティングを学び、アクセンチュアなどのグローバルコンサルティングファームより現職。
著書に、「2時間でわかる図解IoTビジネス入門(あさ出版)」「顧客ともっとつながる(日経BP)」、YouTubeチャンネルに「小泉耕二の未来大学」がある。

















