
通常ドローンを自津飛行させる場合、屋外ではGPS信号を受信して行う。屋内(非GPS環境)で安全にドローンを自律飛行させるには、SLAM(Simultaneous Localization and Mapping)という「地図生成技術」と「自己位置推定」が必要となり、一般的にはカメラを用いてARマーカーといった目印を認識し飛行用地図を生成し、自己位置を推定しながら飛行を行う。
しかし建設現場では、日々刻々と環境が変化するため、目印のタイムリーな設置や飛行用地図生成が難しく、ドローンの屋内自律飛行の障害となっていた。
竹中工務店は、株式会社カナモトと株式会社アクティオとともに、BIMを用いたドローンの「屋内外自律飛行システム」の実証試験を実施した。
「屋内外自律飛行システム」を活用することで、施工管理担当者が行う安全巡回や現地確認を事務所内自席や遠隔地からも行うことが容易となり、作業所への移動時間、現地滞在時間を削減できる。また、自律飛行により現場の写真を自動撮影したり、屋内外のシームレスな飛行は竣工後建物における巡回監視への応用が可能となる。
BIMとは、コンピュータ上に作成した3次元の建物モデルに、仕上げ、コスト、管理情報等の属性データを追加したものを、設計から施工、維持管理まであらゆる工程で活用する概念あるいは業務フローである。
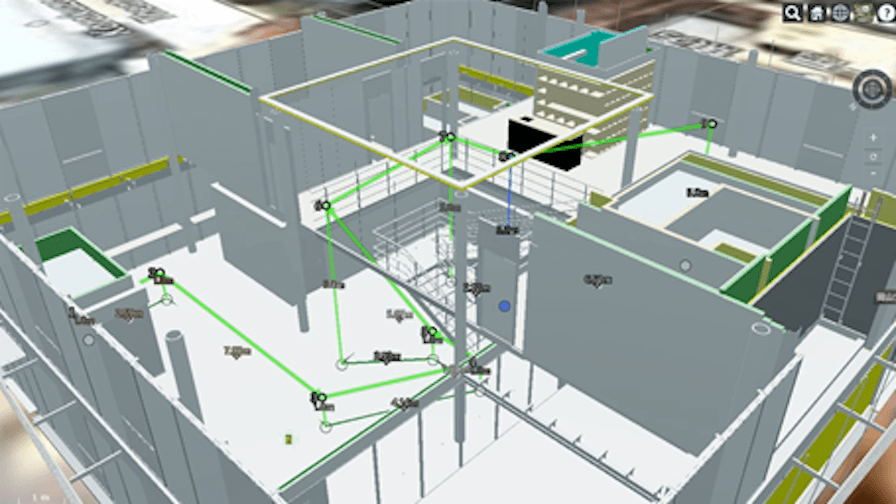
今回の実証試験では、「BIMを用いた離陸・経路・着陸地点の飛行ルート設定」、「手動操作による事前の地図生成を行わずBIMのみで飛行経路及び閲覧対象を設定」によるドローンの屋内自律飛行を同社の建設現場で行い、ドローンの屋内での自律飛行精度確保の有効性を確認したと発表した。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















