TOP >
ロボティクス > 東芝、直接通信による移動ロボット同士の協調連携システムを開発
昨今移動ロボットの活用が進んでいる一方、異なるメーカーのロボットは位置情報などが共有できず、立ち往生してしまうといった課題がある。
そこで株式会社東芝は、NEDOとともに、メーカーや種類が異なる複数の移動ロボットの運用を共通の運行システムで可能とする移動ロボットインターフェースを策定し、インターフェースの標準化を進めている。
そして本日、複数の移動ロボットを直接通信でつなげることにより、相互回避や協調搬送を可能にする協調連携システムを開発したことを発表した。
このシステムでは、運行システムを介さず、移動ロボット間で直接通信するプロトコルを定め、ロボット間の通信経路を切替えることで、移動ロボット同士が直接リアルタイムで情報を交換することができる。
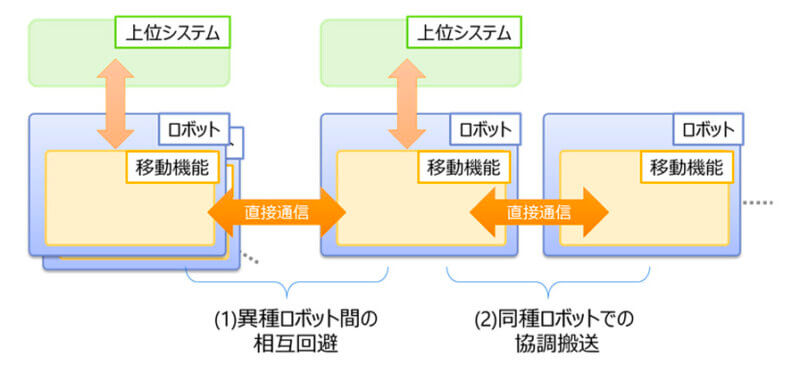 ロボット同士の直接通信により、位置情報などを共有する。
ロボット同士の直接通信により、位置情報などを共有する。
直接通信を低遅延で実現する無線LANマルチホップ方式で実装しているため、複数の同種の小型移動ロボットによる、大きな荷物の協調搬送も可能となる。
なおこのシステムを活用した実証は、深川江戸資料館で実施した芝浦工業大学のロボット連携実験の一つの実証実験として行われた。
また東芝は、同技術の詳細を9月14日から17日にかけて開催される2021年電子情報通信学会ソサイエティ大会にて発表するとしている。
IoTに関する様々な情報を取材し、皆様にお届けいたします。
企業向けAI活用虎の巻

AIによって「優秀な人材」の定義が変化したことを、どうみるべきか —AI時代の人材採...

まだ、生成AIのチャットボットで消耗しているの? ー自律的に動くAIエージェントが働...

AI時代の「中間管理職クライシス」 —部下がAIに相談する時代、上司の価値はどこに残...

AIに仕事を頼む技術 —なぜ「営業資料を作って」と頼むと失敗するのか?

生成AIは、使い手の「言語化能力」を暴く、リトマス試験紙

AIに「ゴミ」を食わせるな ーAIエージェントが賢くなるデータ、バカになるデータ

AIで業務を自動化する方法とは ーなぜ、ChatGPTを配っても仕事は減らないのか?

なぜあなたの会社で、生成AIが活用されないのか?どこで活用すべきか?
生成AI活用ガイド

各社が模索するAIエージェントを現場に入れるためのデバイス、企業は何を問うべきか

米政府に公開3日で停止されたAI「Claude Fable 5」、その能力と企業が今...

AIはSaaSを殺さない、「共存戦争」の裏で本当に起きていること

AIが買い物を代行する「エージェント・コマース」時代、Googleが提唱するUniv...

AIエージェントはどこまで使えるか?検証して見えた「二度手間」の課題と正しい距離感

AIエージェント時代到来、OpenAIのワークスペースエージェントを徹底解説、仕組み...

AI活用で営業・マーケティングはここまで変わる、Anthropic公式ユースケースか...

「この施策、成果につながるの?」と聞かれた時の救世主。AIで「施策の根拠」をリアルタ...

予算会議にAIを持ち込んだらどうなるか?Claudeのカスタムビジュアル機能を検証

営業における見込み客の発掘をAIに任せる、Claude Coworkで自動化と生産性...

