

鹿島建設株式会社(以下、鹿島)は、山岳トンネル自動化施工システム「A4CSEL for Tunnel」(クワッドアクセル・フォー・トンネル)が完成させたと発表した。
同社は、「A4CSEL for Tunnel」の開発を2017年から開発を進めており、2018年からは模擬トンネル、2021年からは実坑道である神岡試験坑道にて、山岳トンネルの掘削作業6ステップの自動化に向けた開発を進めていた。そして今回、神岡試験坑道において6ステップすべての自動化・遠隔化に成功したのだという。
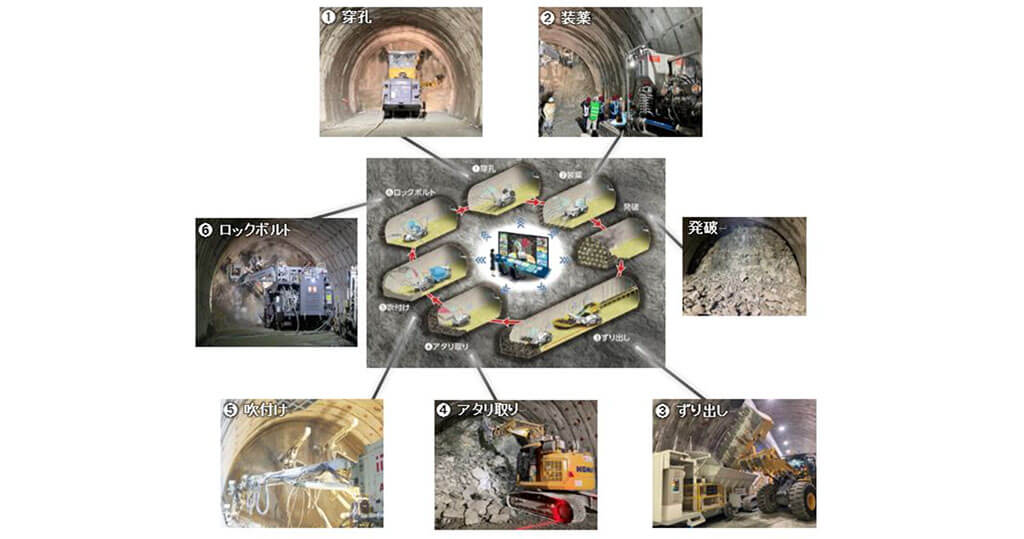
「A4CSEL for Tunnel」は、山岳トンネル工事の掘削作業を、6つの施工ステップ「穿孔」「装薬」「ずり出し」「アタリ取り」「吹付け」「ロックボルト打設」に分け、各ステップで使用する重機を自動化し、それらを一元管理する建設生産システムだ。
今回神岡試験坑道において「A4CSEL for Tunnel」を活用したところ、6ステップすべての自動化・遠隔化に成功したということだ。
鹿島は今後、「A4CSEL for Tunnel」を他の工事に順次導入し、さらなる機能追加・改良を加えていくとしている。
神岡試験坑道における開発成果
穿孔:最適自動発破設計システム
穿孔時に取得した岩盤データから、最適な発破パターンが自動生成されるシステムを開発。発破パターンデータを全自動コンピュータジャンボに転送することで、オペレータ1名での自動穿孔が可能だ。これにより、余掘り量は従来施工比60%低減、サイクルタイムは同比20%短縮を実現した。
装薬:バルクエマルション爆薬
装薬の自動化には、安全性の観点から、装填機内では非火薬、穿孔した孔内で原料を混ぜ合わせることで、初めて火薬化する現場製造式の爆薬が適している。装薬の自動化に向けた第一歩として、現場製造式の「バルクエマルション爆薬」を採用した全断面発破を実施し、許認可関係省庁等に公開した。
ずり出し:自動ホイールローダ、遠隔バックホウ
ホイールローダに搭載したLiDARの計測データをもとに坑内の地図を作成しつつ、自機の位置をリアルタイムで推定するSLAM技術を活用することで、非GNSS環境下であるトンネル坑内においても掘削ずりの掬すくい取り、運搬、荷下ろしの自動化を実現。また、遠隔バックホウとの連携により、ずり出し作業時の切羽近傍の完全無人化を実証した。
アタリ取り:アタリガイダンスシステム、遠隔ブレーカ
ブレーカ本体に搭載した3Dレーザスキャナにより、切羽に立ち入らなくても発破直後の露出した岩盤形状を定量的かつ自動的に評価できるアタリガイダンスシステムを開発した。また、ブレーカを遠隔操作することで、アタリ取り作業時の切羽の完全無人化を実証した。
吹付け:エレクタ付2ノズル自動吹付け機
2ノズル自動吹付け機に搭載した3Dレーザスキャナによる、切羽形状の測定結果を基にして吹付け計画を自動生成し、左右2ノズルをプログラム制御する「自動吹付けシステム」を開発した。2ノズルによる自動吹付けにより、従来の1ノズル自動吹付けと比較して約50%の施工時間の短縮を実証した。
あわせて、「建込みガイダンスシステム」により、支保工建込み目標位置に対する姿勢計算結果に基づいてエレクタを遠隔操作することで、所定の位置への支保工建込みが可能であることを実証した。支保工のセンターボルトにはワンタッチジョイントを、繋ぎ材には固定用アンカーを用いることで、人が切羽近傍に立ち入ることなく、運転席からオペレータ1名での建込みが可能となった。
ロックボルト打設:自動ロックボルト打設機
穿孔位置への誘導から穿孔、モルタル注入、ボルト挿入までの一連作業を自動化するブームを左右2つ備えた「2ブームロックボルト施工機」を開発した。これは、3~6mのロックボルトに対応可能で、施工速度および精度を確保したうえで、オペレータ1名によるロックボルト打設が可能であることを実証した。

無料メルマガ会員に登録しませんか?
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















