

日本電信電話株式会社(以下、NTT)と三菱電機株式会社は、NTTのネットワークおよびコンピュート基盤の連携制御技術と、三菱電機の遠隔操作技術を組み合わせた実証実験を通じて、ロボットアームを用いた作業を遠隔地から違和感なく持続的に操作可能であることを確認した。
三菱電機は、視覚と力触覚との間の感覚間の相互作用を活用した「Visual Haptics」を開発。遠隔地の力触覚情報を色情報に変換し、視覚情報としてユーザに提示することで、力触覚デバイスなしで遠隔地の力触覚情報の伝達を実現してきた。
今回、「Visual Haptics」をロボット内での実装からエッジサーバ上での実装に変更することで、ロボット側で必要な処理負荷を軽減すると共に、エッジサーバの切り替え動作にも対応可能な「Visual Haptics」の研究開発に取り組んだ。

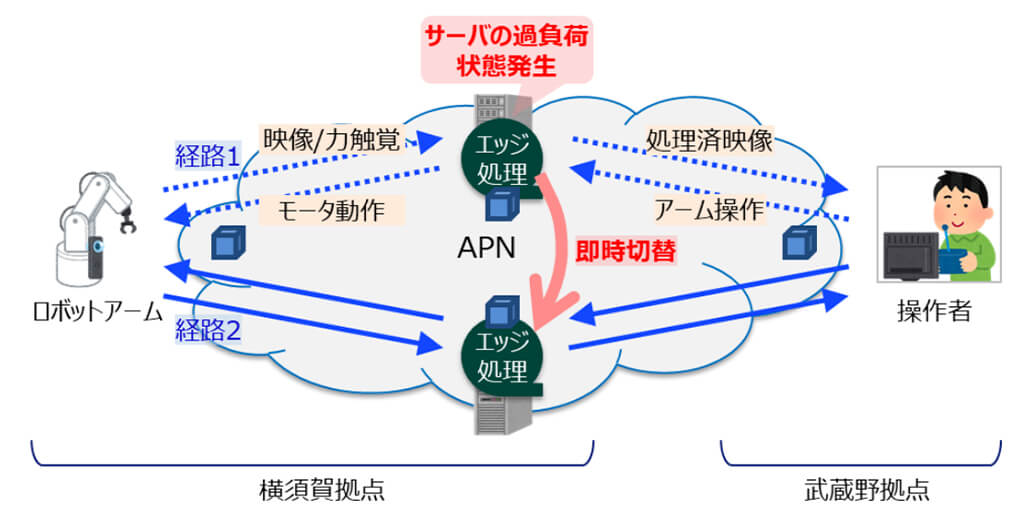
実証実験では、遠隔操作における技術の効果を確認するために、NTT 武蔵野研究開発センタにディスプレイとロボット操作用デバイス、NTT横須賀研究開発センタにロボットを配置し、直線距離50km強の2拠点間を、APNを模擬したネットワークで接続して遠隔操作を行う実験用ネットワークを構築した。
ロボット側で撮影したカメラ映像には、「Visual Haptics」により力触覚情報を付加し、操作者は力触覚情報を視覚的に確認しながら操作を行った。
また、「Visual Haptics」処理に要する時間とネットワークの遅延時間をリアルタイムに測定し、End-to-Endでの遅延時間が性能要件を満たさなくなる場合に、別のネットワークおよび別のサーバ処理へと切り替える機能を備えた。
この実験構成において、エッジサーバを過負荷状態にして遠隔操作環境を悪化させた場合、従来構成では遠隔操作が困難になったが、提案構成では品質が悪化してから約100ms後には切り替え制御が完了した。
加えて、力触覚情報等の感覚情報を遠隔に伝達することで違和感なく操作出来ることを確認し、提案技術の有効性を確認したとしている。
両社は今後、今回の実証実験で得られた成果を活かして適用可能領域を広げ、遠隔手術や遠隔設備修理などのユースケースで適用可能にしていくとしている。
なお、実証実験で実施した技術は、2023年5月17日~18 日に開催予定の「つくばフォーラム 2023」にて紹介される。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















