
KDDI株式会社、株式会社ゼンリン、富士通株式会社は、2018年1月より、完全自動運転時代の「ダイナミックマップ」生成に必須技術となる大容量データの情報収集と、自動運転車へのマップ配信技術の実証実験を開始することに合意した。
自動運転車の安全な走行を実現するには、自車位置把握のための様々な道路構造物情報の正確な把握と、気象情報や事故・渋滞情報などの動的情報を取得して組み合わせる「ダイナミックマップ」の生成が必要となる。
この「ダイナミックマップ」には、自車の走行経路を認識しながら遠方の道路状況をリアルタイムにフィードバックするシステムの構築が欠かせない。
KDDI、ゼンリン、富士通は、「ダイナミックマップ」の生成に必要なデータ収集、データ分析・加工、データ配信技術の実証を行う。
また、実証実験においては4G LTEおよび、今後、次世代移動通信システム「5G」の活用を検討するとしている。
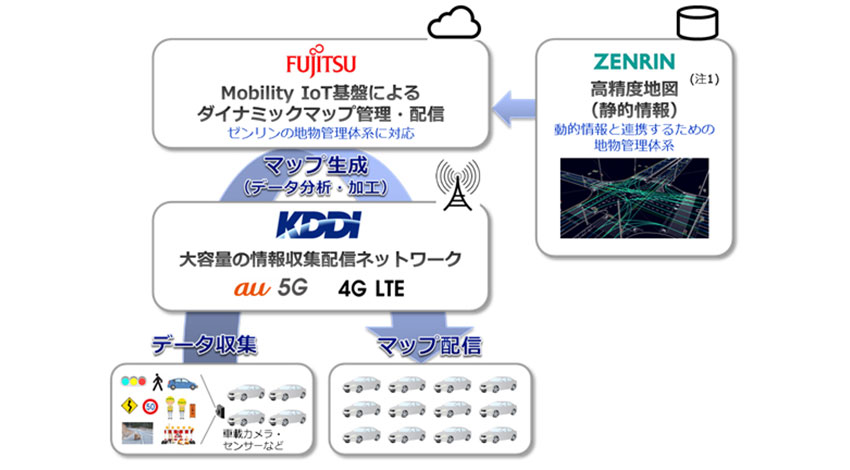
各社の役割は以下の通りだ。
- KDDI:
- 一定間隔で生成される車載カメラやセンサーのデータを確実かつ効率的にアップロードするための車載通信モジュールとネットワークの検証
- 逐次アップデートが必要な動的情報や地図データの差分情報などを必要とする、対象車輌に確実かつセキュアに配信する方式と最適なネットワークの検証
- ゼンリン:
- 動的情報との連携や逐次・差分更新を可能とする高精度地図データの提供および提供プラットフォーム「ZGM Auto」の検証
- 富士通:
- コネクテッドカーから得られるプローブデータなど大量の動的情報を収集し、高精度地図と動的情報の紐付けや車両へのリアルタイムデータ配信などを行うMobility IoT基盤のダイナミックマップ管理機能を提供
【関連リンク】
・ケイディーディーアイ(KDDI)
・ゼンリン(ZENRIN)
・富士通(FUJITSU)
・ダイナミックマップ(内閣府 WEBサイトより)

技術・科学系ライター。修士(応用化学)。石油メーカー勤務を経て、2017年よりライターとして活動。科学雑誌などにも寄稿している。

















