
製造プラントは、広大な屋内空間に多くの設備・機器が設置されており、入り組んだ構造をしているため、人の正確な位置測位が難しい環境だ。
屋内での人の位置測位において、一般的に用いられる技術として「Bluetooth Low Energy」ビーコンからの信号の判別による位置推定技術があるが、金属やコンクリート壁といった障害物が多い環境では、ほかの電波の反射や干渉によって測位の精度が低くなるという課題がある。
また、測位のために等間隔でビーコンアンテナを必要数設置し、作業者が受信機を携帯する必要がある。
そこで、日本電気株式会社(以下、NEC)とNTTコミュニケーションズ株式会社(以下、NTT Com)は、製造プラント内で作業員に異常が発生した際に、3Dマップとスマートグラスを活用して作業員の位置測位を行う実証実験を実施した。
なおこの実証は、JFEエンジニアリング株式会社(以下、JFEE)の協力のもと、同社の運営する実証用プラント「5G Innovation Plant」で実施された。
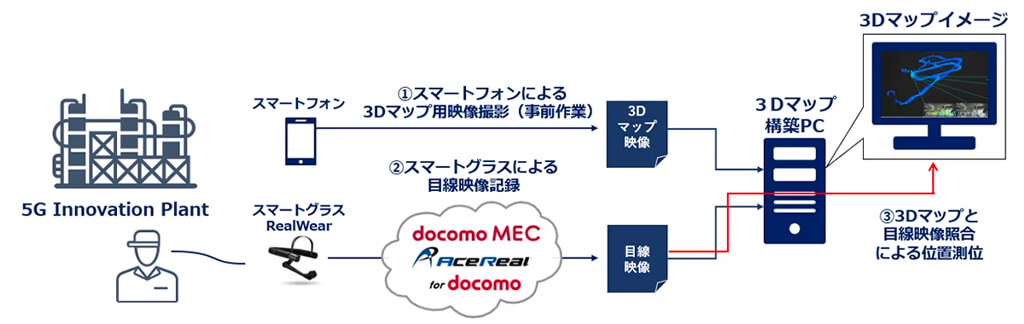
今回発表された実証では、製造プラント内の作業員が装着したスマートグラスから目線映像を取得し、事前に作成した3Dマップと照合することで、作業員の位置測位を行った。
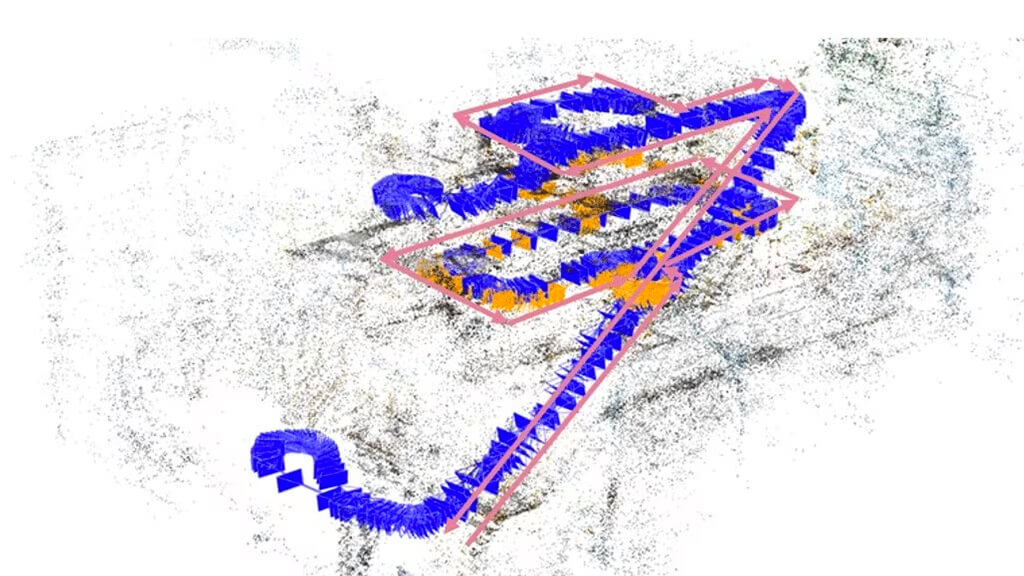
まず、初回のみの工程として、スマートフォンにて事前にプラント内を撮影し、映像データを用いて自己の位置や姿勢の推定と、環境地図作成を同時に行う「VSLAM(Visual SLAM)※」技術で3Dマップを構築した。(トップ画参照)
NECは自社内にて「VSLAM」技術を活用しており、今回JFEE協力のもと、NTT Comとともに人の位置測位に適用した。
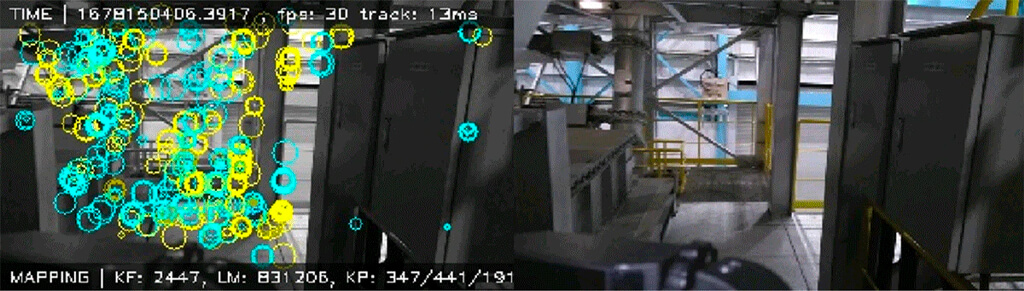
そして、プラント内で作業する作業員がスマートグラスを装着し、スマートグラスで目線映像を記録。記録した目線映像から特徴点を捉え、事前に撮影したプラント内の画像から作成した3Dマップと照合することで、GPSやビーコンを使わずに位置測位した。
その結果、スマートグラスを装着した作業員が歩行速度などを意識して巡回したところ、歩行開始から終了まで正確な位置測位が確認された。
今後は、歩行速度に関わらずに正確な位置測位ができるよう、照合精度の向上に向けたチューニングなどの検証を行う予定だ。
また、今回の実証では、カメラ目線映像をサーバに保存し、オフライン環境で3Dマップと照合して測位精度が確認された。
今後は、3Dマップへカメラ目線映像を直接伝送・照合する仕組みを作ることで、リアルタイムに作業員の位置把握ができるよう準備を進めるとしている。
なお、実証結果をもとにした商用化は、2023年度末ごろに予定されている。
※VisualSLAM:映像データを用いて自己の位置や姿勢の推定と環境地図作成を同時に行う技術。映像を元に位置測位を行うため、施設内に専用のアンテナを設置する必要がない。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















