

昨今、自律走行ロボットの開発・実証が進められているが、ロボットが衝突を避ける際に減速や停止を繰り返すと、そのたびに目的地までの到達時間に遅延が発生するという課題があった。
通常、自律走行ロボットが活用される場所は、ビル内の通路など、自律走行ロボット同士がすれ違えないほどの狭い通路が含まれるケースが多く、通路には通行人や別のシステムの制御下にある多種・複数のロボットが存在している(トップ画参照)。
こうした環境下において、これまでは、MAPF(Multi-agent Path Finding)という、グリッド状のグラフ上で複数ロボットが衝突しない経路を作成する問題設定が研究・応用されてきたが、従来の手法では、遅延の確率分布を正確にモデル化できていることが前提となっており、通路にいる人やロボットの数が変動する現場に適用することは困難であったのだという。
そうした中、パナソニック ホールディングス株式会社(以下、パナソニックHD)は、人や他のロボットが共存する環境下でも、ロボットの効率的な走行経路を計画できる技術を開発した。
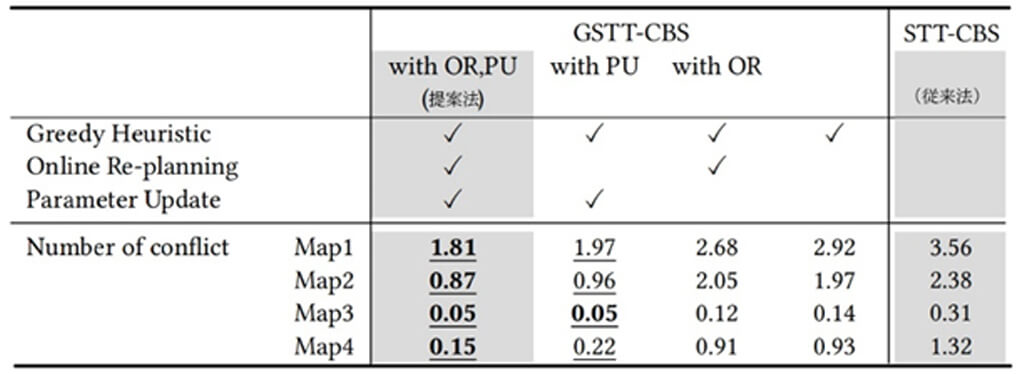
今回開発された技術では、ロボットが特定の経路を走行する際の遅延をパラメータが未知なガンマ分布に従うものと定義し、走行中に得られる遅延の観測値を用いて確率分布のパラメータをベイズ推論で遅延が観測されるたびに更新する。
これにより、推定したパラメータに基づき、最適な走行経路計画を作成することができる。
この技術を活用してシミュレーション実験を行った結果、従来法よりもロボット同士の鉢合わせを約半分に減らし、目的地までの移動時間が短い走行経路を計画できることが実証された。
なお、この技術は、マルチエージェント技術のカンファレンスである「AAMAS 2023(The 22nd International Conference on Autonomous Agents and Multiagent Systems)」に採択され、2023年6月1日、ロンドンで開催されるポスターセッションで発表される。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















