

株式会社東芝と東芝インフラシステムズ株式会社は、NEDOが委託する事業の一環で、電波マップに基づきロボットの移動経路を制御する技術を開発し、ローカル5Gを活用したサーバ集約型技術で、移動ロボット群のリアルタイム制御に成功したことを発表した。
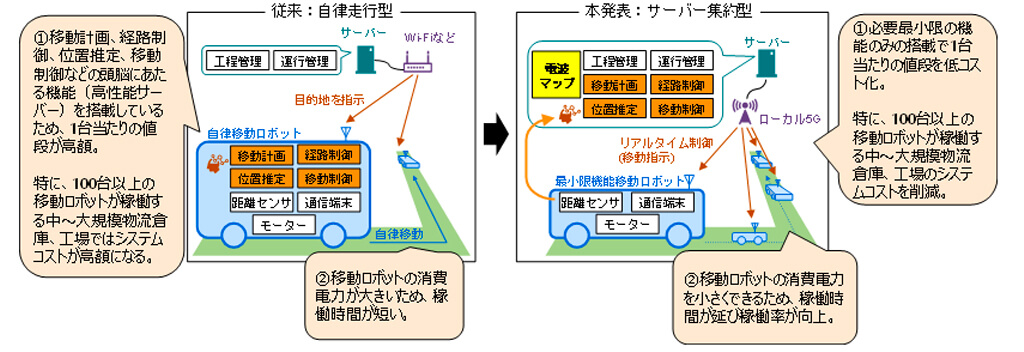
ロボット群のリアルタイム制御を実現するために、ロボット本体には必要最小限の「運ぶ」機能のみを搭載し、ロボットの「頭脳」にあたる機能をサーバーで集約制御するシステムを開発することで、12台の移動ロボットをリアルタイム制御することができた。
サーバー集約型技術においては、電波の遅延や干渉で制御信号がロボットまで到達せず、ロボットが停止する問題があったが、低遅延特性・低ゆらぎ特性を持つローカル5G活用し、ロボット群からの情報で、常に最新の状態に更新される電波マップに基づいた動的経路制御機能を搭載することで解決した。
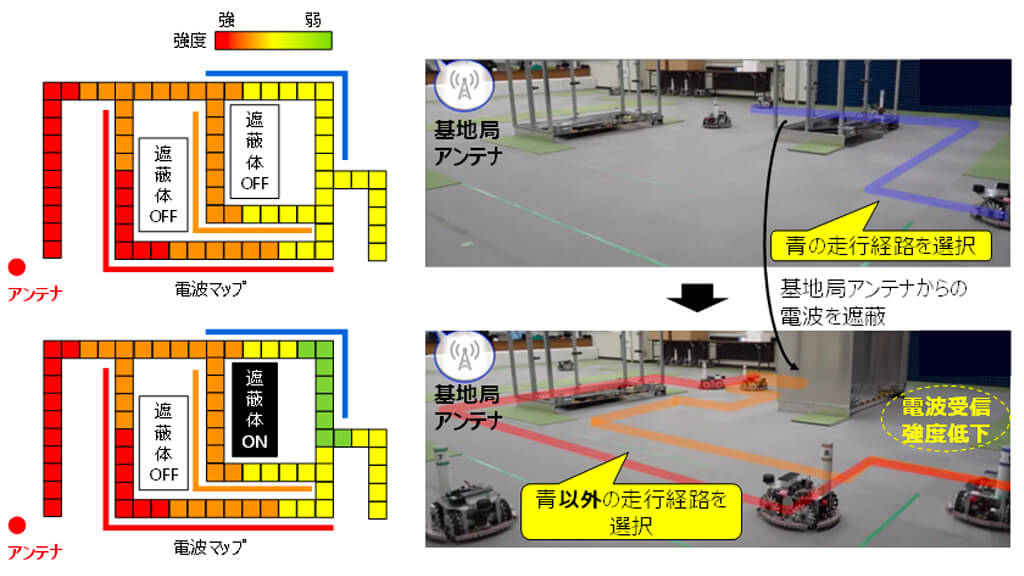
具体的には、ロボットが走行経路上の電波受信強度をちくじモニタリングして、ロボット本体に搭載されている通信端末からサーバに送信することで、サーバが走行経路上の電波状況を電波マップとして生成する。
電波マップは、ロボット群からの電波受信強度情報でアップデートされ、常に最新の状態に保たれる。サーバは電波マップの変化から走行経路上の電波受信強度を予測し、ロボットの経路を選択する。
これにより、ロボット群は常時、受信強度が十分にある経路を停止することなく走行することが可能だ。電波マップは、ロボット本体に搭載されている既存の通信端末機能(電波受信強度取得機能)を活用するため、新たな設備を追加することなく生成することができる。
[今回開発された電波マップに基づくロボットの動的経路制御の様子]今回の事業では、12台のロボット群での実証であったが、ロボットの台数に合わせた拡張性のあるシステム構成により、100台以上のロボットが稼働する中・大規模の物流倉庫や工場などへの適用が可能だ。
なお、今回開発・実証したサーバ集約型の自動搬送システムを導入することで、中・大規模の物流倉庫や工場などにおいてロボット100台を稼働させた場合、自動搬送システムの導入コストを約10%低減するとともに、ロボット本体の機能を絞ることで、消費電力を約14%低減し、稼働率を約16%向上させることが見込める。
さらに、複数の同種類・同サイズのロボットが協調して一つの荷物を挟みこみ搬送する協調搬送技術も開発した。今回、この技術を応用し、ローカル5Gを活用したサーバー集約型で実現した。
[2台のロボットによる1台のカゴ台車の協調搬送の様子]これにより、搬送する荷物の大きさ・重さに応じて、異なる種類・サイズのロボットを導入する必要がなく、自動搬送システムの導入コストをさらに低減することが可能だ。
今後、東芝と東芝インフラシステムズは、2025年の事業化を目指して、物流倉庫や工場などでの実証を進めていくとしている。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















