

現在、国内では、開通から30年を超える高速道路が5割以上を占めており、近年、老朽化による路面変状の発生頻度の増加が顕在化してきている。
走行中にハンドルを取られ、重大事故につながる危険がある路面の穴(以下、ポットホール:トップ画参照)は、中日本高速道路株式会社(以下、NEXCO中日本)管内の高速道路で、2019年度には約3,200件の発生が確認されているのだという。
ポットホールは初期の状態では路面変状が現れにくく、路面に変状が確認されると比較的短期間で路面損傷へと進展する特徴があり、早期発見・早期修繕が不可欠だ。
現在の点検は、点検員が車両に乗り込み、路面や標識などさまざまな点検対象の確認を目視で行っているが、時間的ロスが大きいケースも生じているほか、点検品質のばらつきにもつながるという課題がある。
こうした中、株式会社東芝、東芝デジタルソリューションズ株式会社は、ポットホールを検知する路面変状検知AIを開発し、NEXCO中日本と共同で進める高速道路の日常点検の高度化に向けた実証実験において、このAI技術の有効性を検証した。
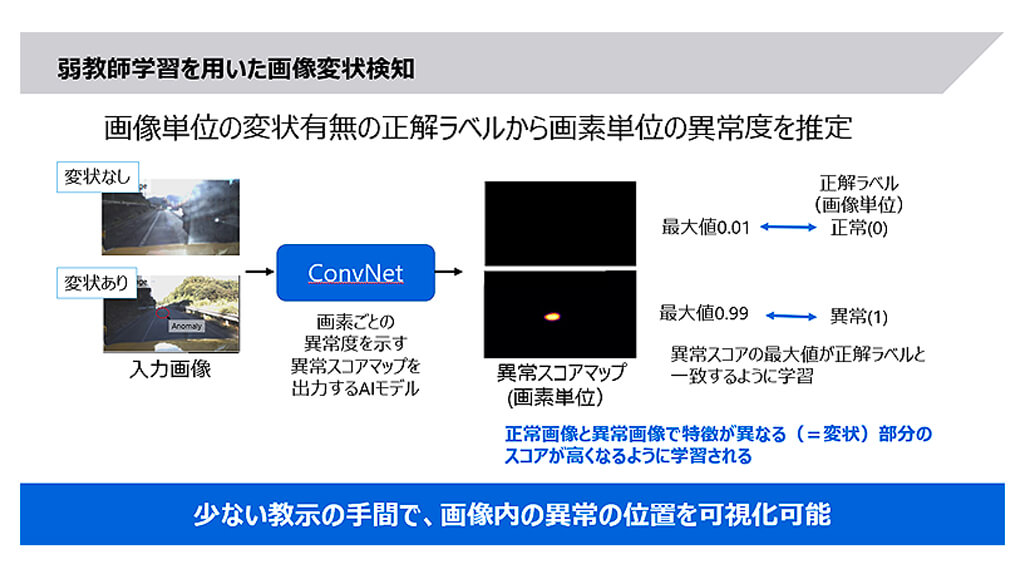
東芝と東芝デジタルソリューションズが開発した路面変状検知AIは、弱教師学習の手法を適用しており、変状の有無を選別して学習することで画像内の変状位置を推定する。
入力した画像に対して異常スコアマップを出力する深層モデルを用い、異常スコアマップの最大値と入力画像の変状有無が一致するように学習させることで、正常画像と異常画像の特徴の異なる部分、すなわち変状部分のスコアが大きくなるような異常スコアマップを出力する。
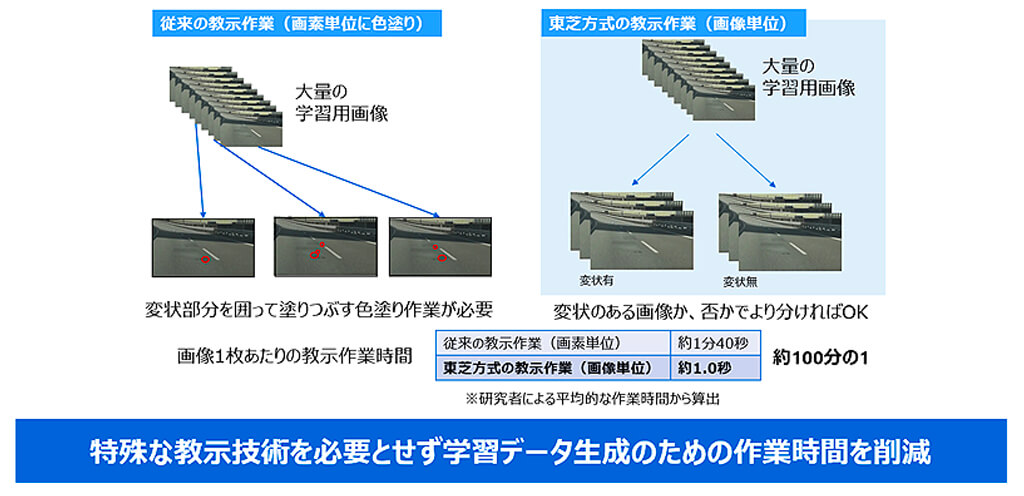
弱教師学習を用いることで、画像1枚あたりの教示作業時間を、従来と比較して約1分40秒から約1秒と、約1/100に短縮することができる。
また、NEXCO中日本との共同実証実験では、NEXCO中日本の車両に搭載したカメラで収集した画像に今回のAIを適用し、高速道路の走行中にリアルタイムにポットホールを高精度に検知する技術の有効性を検証した。
具体的には、NEXCO中日本の車両で、伊勢原保全・サービスセンタ管内の新東名高速道路・東名高速道路等を走行して路面画像を収集し、NEXCO中日本の知見を用いて、ポットホールの有無のみを選別した学習データを作成した。

この学習データを用いて追加学習したポットホール検知モデルを用いることで、一般道の画像で学習した汎用道路モデルと比較して、検知精度はROCAUC(異常検知アルゴリズムの評価指標の1つ)で、61.25%から84.22%に向上した。
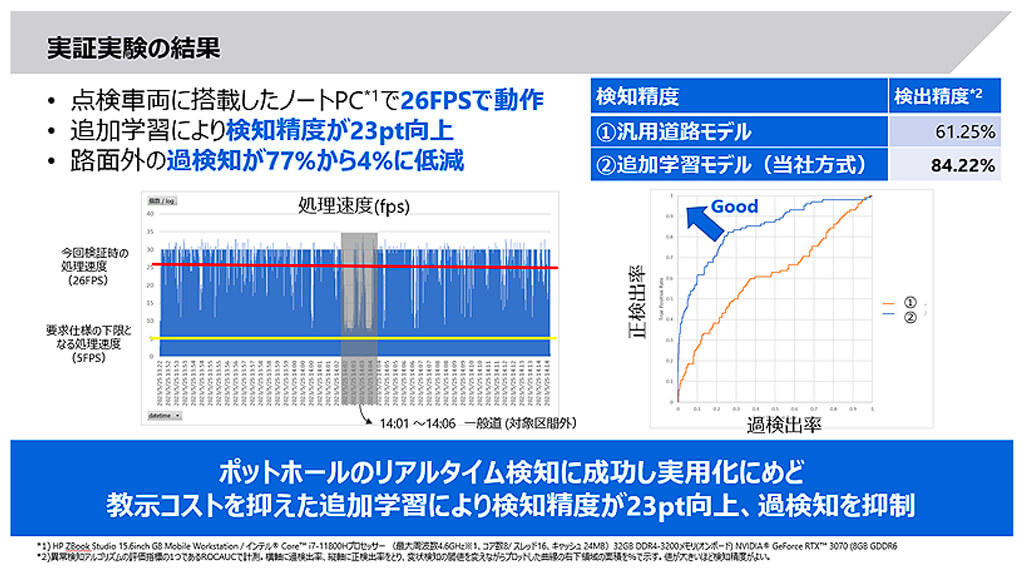
また、路面外の過検出を77%から4%に抑えつつ、時速80km~100kmで走行しながらポットホールの可能性がある箇所をリアルタイムに検知可能なことが確認された。

これにより、AIを活用したポットホール検知システムの2024年度の実用化に目途が立ったのだという。
なお、東芝は、本AIおよび今回の実証実験の詳細について、9月11日から東京で開催されるインフラ保全の国際会議「PHMAP23」にて9月12日に発表します。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















