

クラウドロボティクス・プラットフォームの仕組み
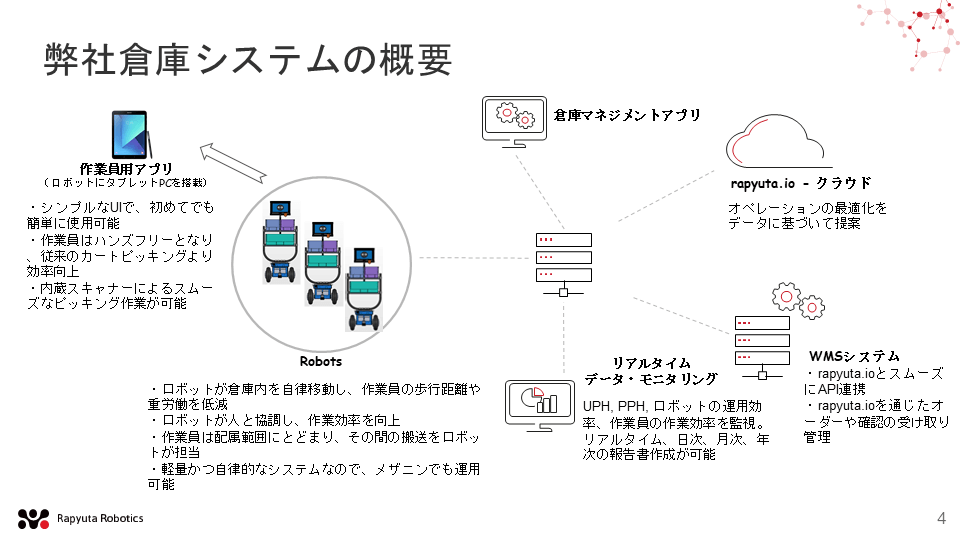
クラウドロボティクス・プラットフォームは、倉庫マネジメントアプリ、WMSシステム、リアルタイムデータモニタリングといったソフトウェアがエッジサーバーに置かれているrapyuta.ioを介してロボットと連携を行うという仕組みになっている。
なお、協調制御AIはクラウドのrapyuta.ioが、エッジサーバーのrapyuta.ioを介してロボットへ指示する際に使用されている。
AMRの仕組み
クラウドロボティクス・プラットフォームが各ソフトウェアと連携して、ロボットへ指示していることはわかったが、ロボットそのものはどのように動作しているのだろうか。
- まずロボットに必要なのはマップだ。マップはロボットがレーザーで周囲の環境をスキャンすることで作成される。そのためには一度、倉庫の中をロボットに歩かせることが必要だ。これはレイアウトが変わればその度に行う必要があるが、そこまでの負担はないという。そして、各ロボットが作成したマップはクラウドロボティクス・プラットフォームにアップロードされ、各ロボットへシェアされる。
- マップが作成されたら、ユーザーが商品棚に対しA棚、B棚といったタグ付けを行う。これは後々、ロボットがどの棚へ向かえばよいかを認識するために必要なデータとなる。
- ロボットは1と2のデータをマスターとして、自己位置推定を行い、指示通りの商品棚へ移動できる。具体的には、ロボットがレーダーで常に周囲の環境をスキャンし、そこで得られた環境情報の特徴をマップ上で参照する仕組みとなっている。
ロボットが動く仕組みの次にオーダーの振り分けプロセスについても森氏から紹介された。
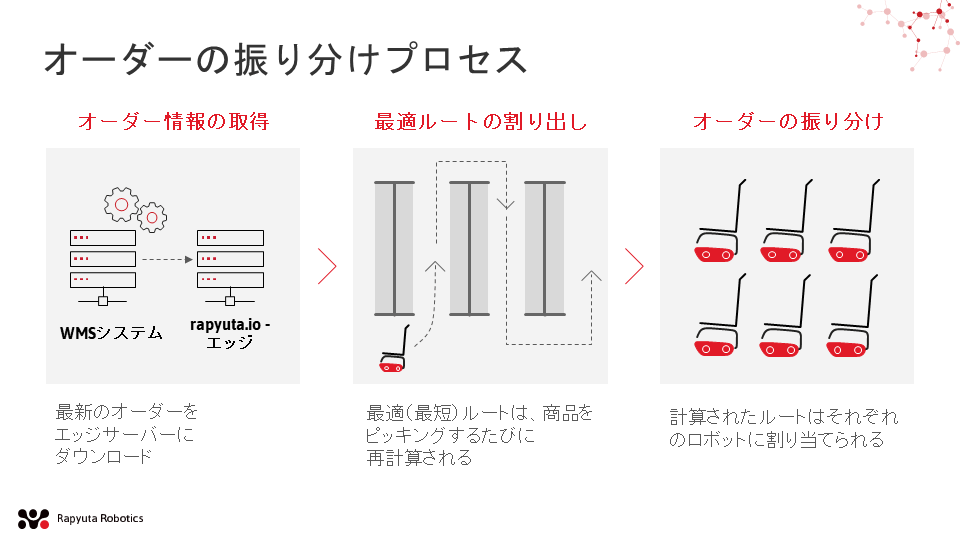
- ロボットがWMSから注文情報をダウンロードする。
- 協調制御AIが注文された商品のロケーションとロボットの台数、棚の空き具合等、様々なパラメーターにしたがって、最適ルートを計算する。
- ルートそれぞれにロボットが割り当てられる。
- ロボットがピッキングをするたびに2・3の処理が繰り返される。
GTPより費用対効果の高いAMR(自律移動ロボ)
クラウドロボティクス・プラットフォームおよびAMR(自律移動ロボ)の仕組みについては理解できたが、肝心の費用対効果はあるのだろうか。
AMR(自律移動ロボ)が他のピッキング手段と比較して、どれだけの生産性があるのかについて森氏から説明された。
ある計算によれば人間がカートを使ってピッキングする場合は、1時間あたり90個の物がピッキングされるという。
一方、AMR(自律移動ロボ)の場合では、1時間あたり200個の物がピッキングされる。つまりAMR(自律移動ロボ)は人力と比較すると2倍の生産性を有していることになる。
もちろん、倉庫の環境によって数字は変動するが、傾向として捉えるとAMR(自律移動ロボ)のほうが、人よりも生産性が高いといえる。
しかし、キバ(現ドライブ)やEVEといったGTP(Goods to Person)であればさらに効率的な作業が可能で、1時間あたり300個の物をピッキングすることができる。つまりAMR(200個/h)はGTP(300個/h)の約70%の生産性にとどまるといえる。
では、AMR(自律移動ロボ)を導入するメリットはあるのだろうか。
森氏によればAMR(自律移動ロボ)の生産性がGTPの70%だとしても初期投資やメンテナンスコストを考慮すると、AMR(自律移動ロボ)はGTPの20%~30%の程度の費用であるため、費用対効果は十分期待できるという。
また、ユーザーは作業量にあわせてロボットを増やしたり減らしたりと、繁閑期にあわせることができるというのもメリットの1つだ。
さらに、ピッキングに慣れていない作業者もロボットの指示にしたがって動けばよく、熟練者でなくても一定の生産性が見込める。
森氏は、「現状クラウドロボティクス・プラットフォームはハードウェアでいうとAMR(自律移動ロボ)との連携のみになっているが、ゆくゆくはアームやフォークリフトとも連携して、多種多様なロボット間の協調制御を可能にしたい」と話した。
物流サービスのフレームワーク化
「日本の物流品質は高いが、海外では市場をとるに至っていない。これは作業員ひとりひとりのノウハウが属人化されてしまっていることが原因だ」と森氏はいう。
しかし、「そうしたノウハウは、デジタルによってフレームワーク化することで海外へ輸出可能となるので、日本が海外の市場を獲得できる可能性は残されている」と森氏は講演を締めくくった。
現在、デジタルをビジネスに取り込むことで生まれる価値について研究中。特にロジスティクスに興味あり。IoTに関する様々な情報を取材し、皆様にお届けいたします。

















