

令和3年版の交通政策白書によると、2019年度の人の移動の7割強、貨物の輸送の9割が道路交通を利用しており、道路交通が非常に重要な役割を果たしている一方で、車両での移動時間の約4割を渋滞が占めていると公表されている。こうした問題を解決するために、2021年5月に政府が発表した第2次交通政策基本計画では、道路交通ビッグデータやAIを活用した渋滞対策の加速の必要性が謳われている。
多数の物体の動きを把握する方法として、従来のコンピュータを用いた数理最適化(※1)の手法が用いられている。しかしながら、交通量が増えると計算時間が増大するため、渋滞など交通量の多い環境で多数の車を検出して動きを捉え、リアルタイムに車の流れを把握することは困難だった。
NECソリューションイノベータ株式会社は、川崎市が提供する道路インフラにおける実証フィールドを使用し、量子コンピュータを用いた交通流解析により車両の動きをリアルタイムに把握するための実証実験を2021年8月~2022年3月31日まで実施することを発表した。
川崎市では、交通渋滞や交通事故などの課題の解決に向けた取り組みを効率的、効果的に推進するため、ICT等のデジタル技術を活用した新しい製品や技術開発の現場実証に必要となるフィールド(同市が管理する道路施設等)を企業等に提供している。今回、川崎市が提供する実証フィールドの1つである鋼管通り交差点(川崎市川崎区)を使用し、交通流解析の実証実験を行う。
具体的には、まず汎用的なカメラを交差点に設置し、1秒間に15~30コマ(15~30fps)程度のシャッタースピードで車の流れを動画で撮影する。動画の各コマに写った車両が同一車両か判別するため、量子コンピュータを活用し、車両の位置や外観の情報をもとに、条件が最も近い車両をマッチングさせる数理最適化を実行する。これにより、リアルタイムに車両の動きを捉え、交通の流れを把握できるか検証する。
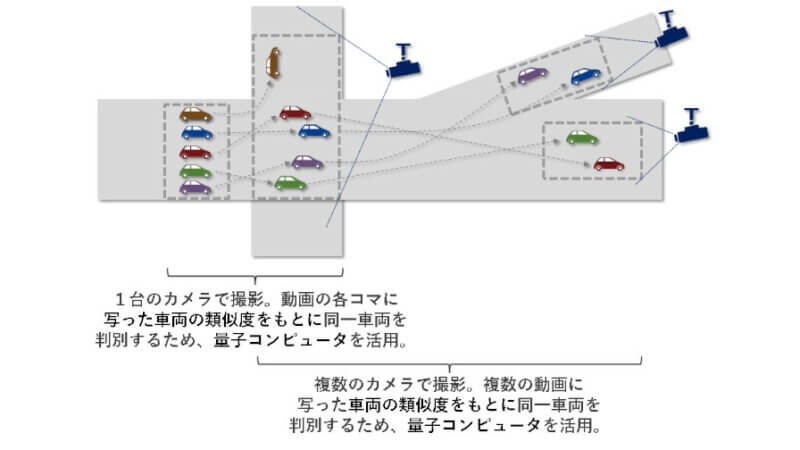
当初は1台のカメラを用いて車の流れを撮影する。動画の各コマに写った車両の類似度をもとに、同一車両を判別して動きを捉えることができるか検証する。検証確認後、複数台のカメラで車の流れを撮影する。複数のカメラで撮影した場合においても、動画の各コマに写った車両の類似度をもとに、同一車両をリアルタイムに判別し、動きを捉えることができるか検証する。
これにより、カメラ1台では撮影できない車両がある場合においても、設置位置・角度を変えた他のカメラで撮影した車両と照合することで、車両の動きを把握できるか確認する。
撮影には、高額な高性能のカメラではなく汎用的なカメラを用いることで、将来的には交差点などに設置されているカメラなどの活用により低コスト化を実現し、より多くの地域での活用を目指す。使用する量子コンピュータはアニーリング型で、シミュレーテッド・アニーリングマシン(※2)を含むNECや他社製のコンピュータの機種から最適なものを選択する。
※1 数理最適化:問題に対して、定められた条件や評価尺度で、最も良い答えを求める数学手法。人材配置、物流計画、エネルギー管理、意思決定支援、人工知能など、様々な領域で利用されている。
※2 シミュレーテッド・アニーリングマシン:アニーリング処理に適した独自開発のアルゴリズムを組み込んだソフトウェアとベクトルコンピュータを組み合わせた、高速処理が可能なマシン。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















