

ソフトバンク株式会社は、本田技研工業株式会社および株式会社本田技術研究所(以下、Honda」)と共に、3GPPで標準化された通信規格セルラーV2Xを活用した車両や、路側センサなどの交通インフラの情報連携により、事故リスクの予測と通知を行うユースケースの検証を、2024年6月に完了したと発表した。
なおこの検証は、中日本高速道路株式会社(以下、NEXCO中日本)が新東名高速道路の建設中区間で行っている「高速道路の自動運転時代に向けた路車協調実証実験」の一環で実施したものだ。
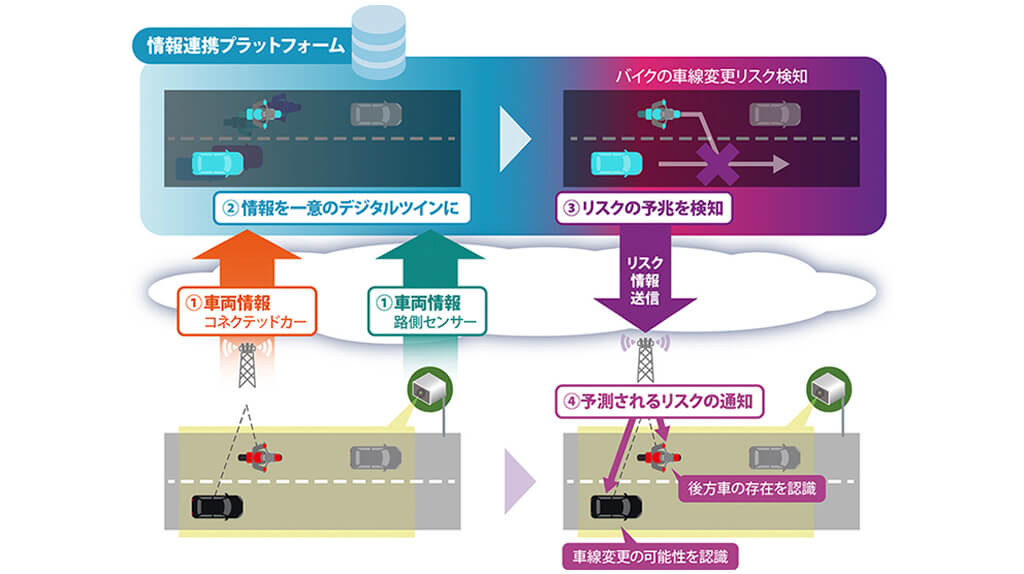
今回の検証では、高速道路を二輪車が走行している環境で、運転手の不注意などにより急な車線変更を行ってしまい、周囲の車両にリスクが及ぶシーンを想定して検証が行われた。
具体的には、二輪車(コネクテッドカー)とその前方を走行する車両(非コネクテッドカー)との車間距離が小さくなっていく場合に、二輪車が隣接車線の後方の車両(コネクテッドカー)を見落としたまま車線変更を行うことで、二輪車と隣接車線後方の車両との衝突、あるいは隣接車線後方の車両の急制動などのリスクが発生するケースを想定した。
これらの状況に対して、LTEや5GのセルラーV2Xを活用することで、運転手の行動を予測し、リスクの高い行動を起こす前に適切な情報通知を行った。
今回の検証では、ソフトバンクがセルラーV2X環境の提供に加えて、道路全体の交通状況を集約するための情報連携プラットフォームを構築した。
この情報連携プラットフォームは、コネクテッドカーの位置・速度情報、車両情報に加えて、路側センサーから観測された非コネクテッドカーの位置・速度情報も集約している。
一方で、この情報連携プラットフォームには、さまざまな情報元からのデータが集約されるため、粒度や精度、形式などが統一されていないという課題があった。
この課題を解決するため、情報連携プラットフォーム上でソフトバンク独自の補正・ひも付けロジックを適用することで、各交通参加者の位置を一意に特定可能なデジタルツインをリアルタイムに生成した。
これにより、コネクテッドカーと路側センサーで二重に観測されたデータを適切に統合し、現実と同様に物体を認識することを実現した。
また、この情報連携プラットフォームからリアルタイムに配信される一意な交通参加者情報を基に、Hondaが研究を行っている「リスクアルゴリズム」が数秒先の行動について予測を行った。
この「リスクアルゴリズム」でリスクがあると判定された場合に、コネクテッドカーに対して適切なタイミングで情報通知が行われることで、運転手がリスクの予兆を認識して事故を未然に回避することが可能なことが確認された。
今回の検証により、セルラーV2Xを活用して、コネクテッドカーや高速道路に設置されている路側センサーから得た周辺の車両情報を集約し、デジタルツインで再現することで、数秒先の行動を予測して事故リスクを検知するとともに、その情報をコネクテッドカーへ通知することに成功した。
また、事故リスクを適切なタイミングで通知することで、コネクテッドカーや二輪車、非コネクテッドカーなどの多様な車両が走行する環境でも、運転手が事故を未然に回避して安全に運転できることを確認された。
[今回の検証の紹介動画]
無料メルマガ会員に登録しませんか?
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















