人口減少という局面の中、人に変わる労働または人をアシストするロボティクスに注目が集まっている。IoT・AIの進化に伴いロボット自体が賢くなり、できることは飛躍的に増えていくことが想像できる。
国際ロボット連盟IFRの調べによると、世界の産業用ロボット販売台数は年々増加しており、産業用ロボットの年間販売量が過去5年間(2013〜2017年)で114%増加しているという。
そこで今回は現在活躍している産業用ロボットの紹介をしたい。
人とロボットが共に働く
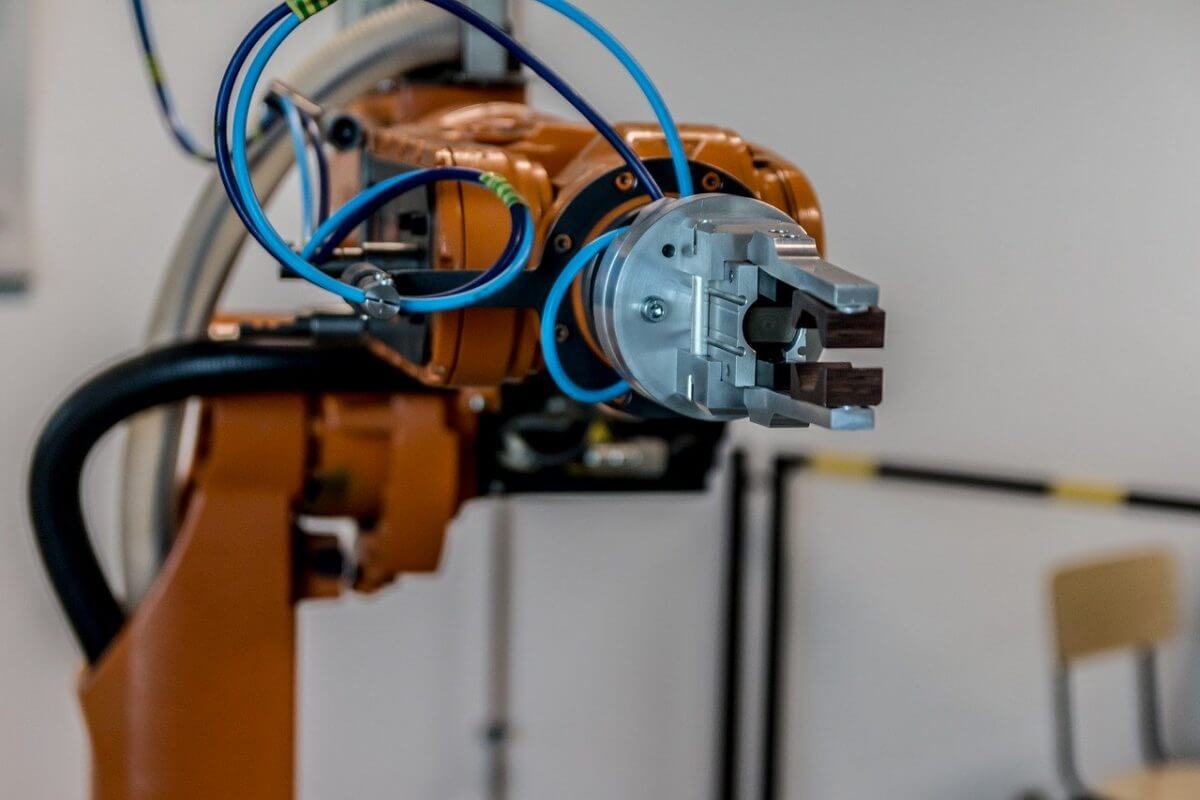
まずは協働ロボットメーカー、ユニバーサルロボットの協働ロボット「UR16e」を紹介する。

協働ロボットというのは、工場の中で人と同じ空間で動き、梱包、パレット、組み立て、ピック・アンド・プレイスなどを行うものだ。
2013年以前は産業用機械が人に接触した際に危険が生じる恐れから、産業機械の周りに柵を設けることが義務付けられていた。
しかし「産業用ロボットに係る労働安全衛生規則第150条の4の施行通達の一部改正」により、人に対して危害が生じないことが本質安全または、センサーなどの制御による機能安全といったリスクアセスメントを行えば、柵を設けずロボットを設置し、人と協働することが可能になった。
そしてこのUR16eは、安全基準である「EN ISO 13849-1、カテゴリ3 PLd、EN ISO 10218-1」を満たしている。
UR16eの機械としての特徴は、家具のように簡単に組み立てることができ、プログラミングも容易で、開梱から作業開始まで1時間も要さないことだ。
そして設置面積が小さいため、生産を中断することなく製造現場に組み込むことができる。さらに生産ラインのレイアウトを変更せずに、様々な用途に対応して再配置も容易に行うことができる。
最大の特徴は可搬重量16kgで、人にとって負荷の高い作業を自動化できる点だ。ストレスや不慮の事故を招く危険性のある、重い荷物を扱う反復作業をロボットに任せることができる。
ユニバーサルロボットのHPでは、ロボットを組み立てたことのない工場のCEOが、自らUR16eを組み立ててプログラミングを行う動画が紹介されている。
24時間動けるメリット
次は農作業を賄ってくれるロボットを紹介する。

これはスマートロボティクスが開発したビニールハウス内で栽培されているトマトを、AIと自動走行型アームロボットを掛け合わせて収穫を行う「トマト自動収穫ロボット」だ。
ミニトマト収穫をロボットに任せる際の課題は、ミニトマトは鈴なりで果実がなり、傷つきやすくサイズが小ぶりであることから、認識から収穫まで作業が繊細であることだ。
そこでこの自動収穫ロボットには、カメラや距離センサーが搭載されており、ディープラーニングによる画像認識などの技術を用いて、トマトの認識、サイズ判別や収穫判断を行い、ハウス内を自動的に移動しながら、ヘタが取れないようにミニトマトを収穫してカゴに詰めていく。
2019年3月にスマートロボティクスのオフィス内に設置されたミニトマト苗の収穫実験では、1個あたりの収穫時間は約15秒だったという。
今後は、量産に向けたコストダウン、自動走行機能の改良、昼夜での認識機能の向上などを進めて、2020年春の実用化を目指すということだ。
価格が下がり夜間作業も行うことができれば、24時間作業ができ、投資回収を早めることが期待される。
農業の分野でもこのような反復作業や負荷の高い作業、斜面など作業環境の悪い場所にロボットの活用が検討されている。
ロボットに必要な「目」を開発
最後に紹介するのは、最初に紹介したユニバーサルロボット「UR16e」のような協働ロボットの、「目」にあたる技術だ。この「目」が搭載されることにより、人の経験や感覚を必須とし、人に依存していた組立、検査、搬送工程などの自動化することを可能にする。

例えばバラ積みされた部品の位置や姿勢を即座に認識するためには、3次元形状画像を生成する3D計測技術と、対象物の位置姿勢を認識する3D認識技術を高速化する必要がある。
通常ひとつの部品を認識するためには、部品の位相を変えたパターンを10回以上撮影し、対象の3次元形状を計測するため時間を要していた。しかしオムロンは、独自のパターン照明を用いて1回の撮像で対象物の3次元形状画像を生成する3D計測技術を開発した。
また、対象物を検出する上で、必要な情報を選択して用いることで物体を検出する画像処理のアルゴリズムを、2Dでの活用から3Dに拡張することにより、3Dの物体を認識することに成功している。
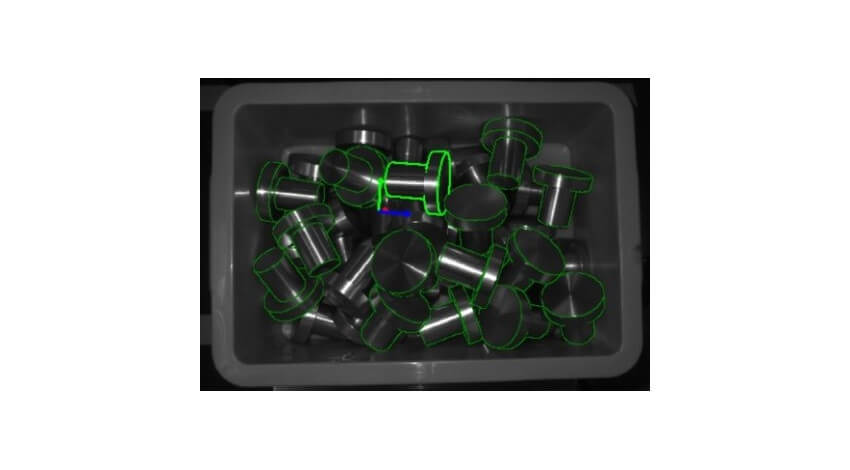
この2つの技術により、部品がバラ積みされて様々な姿勢から形が変わっていても、3次元形状画像を生成し、それを認識するのに約0.5秒での部品認識を行うことが可能になっている。
さらにカメラを小型化し、約500gに軽量化したことで、小型ロボットのハンド部分へ搭載可能となった。小型ロボットであれば、部品の設置状態に応じて3D画像センサーの視点を細かく移動することができるため、さまざまな位置姿勢の部品に対応するピッキングを実現できるのだ。
このように一言に産業用ロボットといっても、様々なシュチュエーションの課題を理解し、そこに必要な形状や技術を搭載することで、痒いところに手が届くロボットが生み出されている。
また様々な試行錯誤を行いコストダウンを行なったり、レンタルにすることなどで導入のハードルを下げ、投資回収の目処を明確にすることで、事業者が導入しやすい導線にも配慮されていることが伺えた。
無料メルマガ会員に登録しませんか?

現在、デジタルをビジネスに取り込むことで生まれる価値について研究中。IoTに関する様々な情報を取材し、皆様にお届けいたします。