

「Honda RaaS Platform」実装の仕組み
東氏による「Honda RaaS Platform」の概要説明があった後に、モデレーターであるSORACOM・ソリューションアーキテクトの今井雄太氏を交え、パネルディスカッション形式で「Honda RaaS Platform」の仕組みなどについてトークが進んだ。
今井氏が提示した1つ目の疑問は「Honda RaaS Platoformはどのように実装されているのか」ということ。これについては、下記のような図を用いて東氏が説明した。
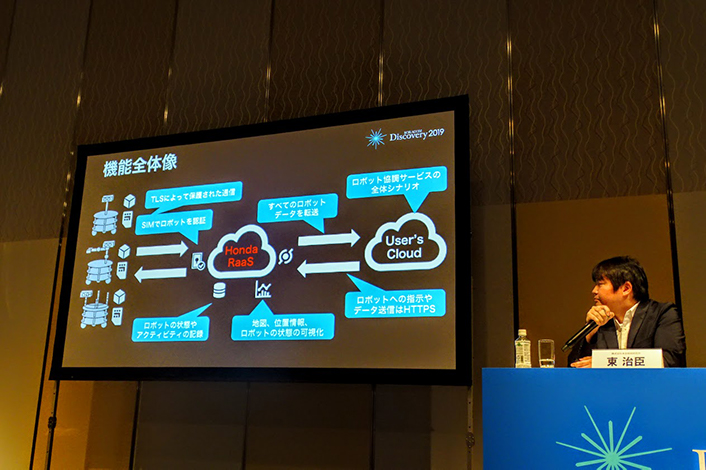
まず各ロボットから稼働状況や位置情報などのデータを吸い上げ、「Honda RaaS Platform」上でロボットの状態を可視化。そして全てのロボットデータをユーザー側のクラウドに上げ、ユーザーはロボットを利用してどのようなサービスを提供するのかをシナリオを構築する、というのが流れであると、本田技術研究所・東氏は語った。
そもそもロボットはどのように動いているのか
続いて今井氏が出した疑問は「そもそもロボットはどのような仕組みで動いているのか」という、基本的なことを確認するもの。
これに対して本田技術研究所・東氏は「ロボット用の通信ミドルウェアを利用している」と答えた。
ミドルウェアとはコンピューター上において、アプリケーションソフトとOSなどのシステムプログラムの中間に位置するソフトウェアのことであり、複数のコンピューターやプロセッサーを利用して分散処理を行う際に、アプリケーション同士の同期など複雑な処理を総合的に担うもの。

ロボットはこのミドルウェアを介してコマンドが流れることで動いていると、本田技術研究所・東氏は述べた。
次ページは、「ロボット開発の環境はどう変わるのか」

1986年千葉県生まれ。出版関連会社勤務の後、フリーランスのライターを経て「IoTNEWS」編集部所属。現在、デジタルをビジネスに取り込むことで生まれる価値について研究中。IoTに関する様々な情報を取材し、皆様にお届けいたします。

















