
近年、道路情報を、仮想空間のマップ(以下仮想マップ)上に再現し、安全運転を支援することなどに活用されているが、車や自転車、人などの移動体をリアルタイムにマップ上に表示することは困難であり、課題であった。
そうした中、株式会社NTTドコモ、AGC株式会社、NTTコミュニケーションズ株式会社(以下、NTT Com)は、トヨタ自動車株式会社(以下、トヨタ)と共同で、建物の窓ガラスに設置したカメラで撮影した移動体の映像を5G通信で伝送し、仮想マップ上に表示する実証実験を、2022年7月7日より実施しており、本日、実験が成功したことを発表した。
この実証実験では、静岡県裾野市にあるトヨタの東富士研究所内実験場に、可搬型の5G基地局1局を設置して5G通信エリアを構築した。

そして、建物の窓ガラスにカメラとAGCの5Gガラスアンテナ「WAVEATTOCH」を設置し、撮影した映像をドコモの5G通信(sub6帯と28GHz帯)経由で「docomo MEC」のクラウドサーバ上に送信する。
その後、「docomo MEC」のAI動画解析技術を活用した移動体の判断に加え、それぞれの位置を高精度に把握し、仮想マップ上に表示する。
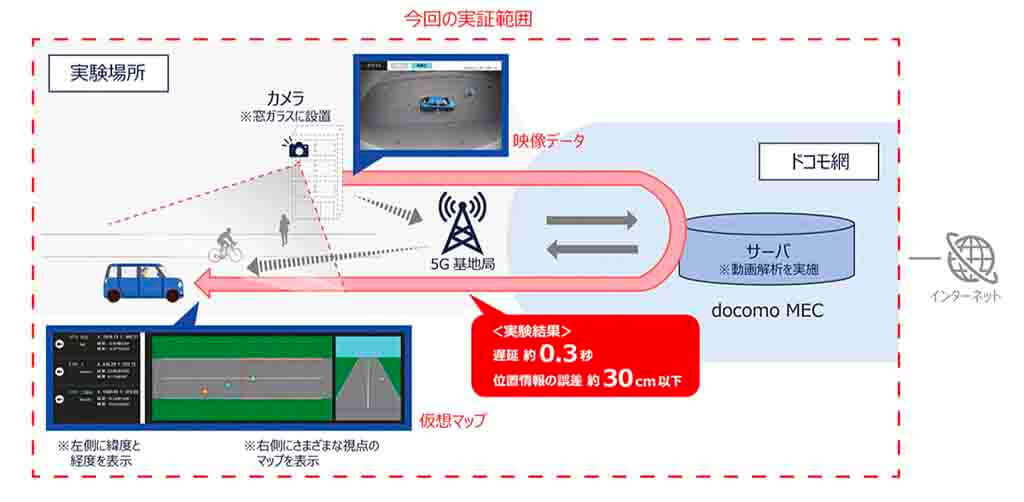
実験の結果、カメラ撮影から車中で仮想マップを表示するまでの遅延は約0.3秒、位置情報の誤差は約30cm以下であった。また、走行している車中で仮想マップを確認することで、死角から車に近づく自転車や人を確認することに成功した。
さらに、GPSが届かないエリアにおける正確な位置情報の把握が可能であり、AIで処理された画像を可視化することで、運転する際の支援情報をインフラとしてサポート可能。また、5Gガラスアンテナの活用により、カメラなどの設置場所の制約を低減することができる。
ドコモ、AGC、NTT Com、トヨタは、今後も現実空間とメタバースを融合し、相互に情報を補完することで社会課題の解決に取り組んでいくとしている。
IoTに関する様々な情報を取材し、皆様にお届けいたします。

















